文章摘要
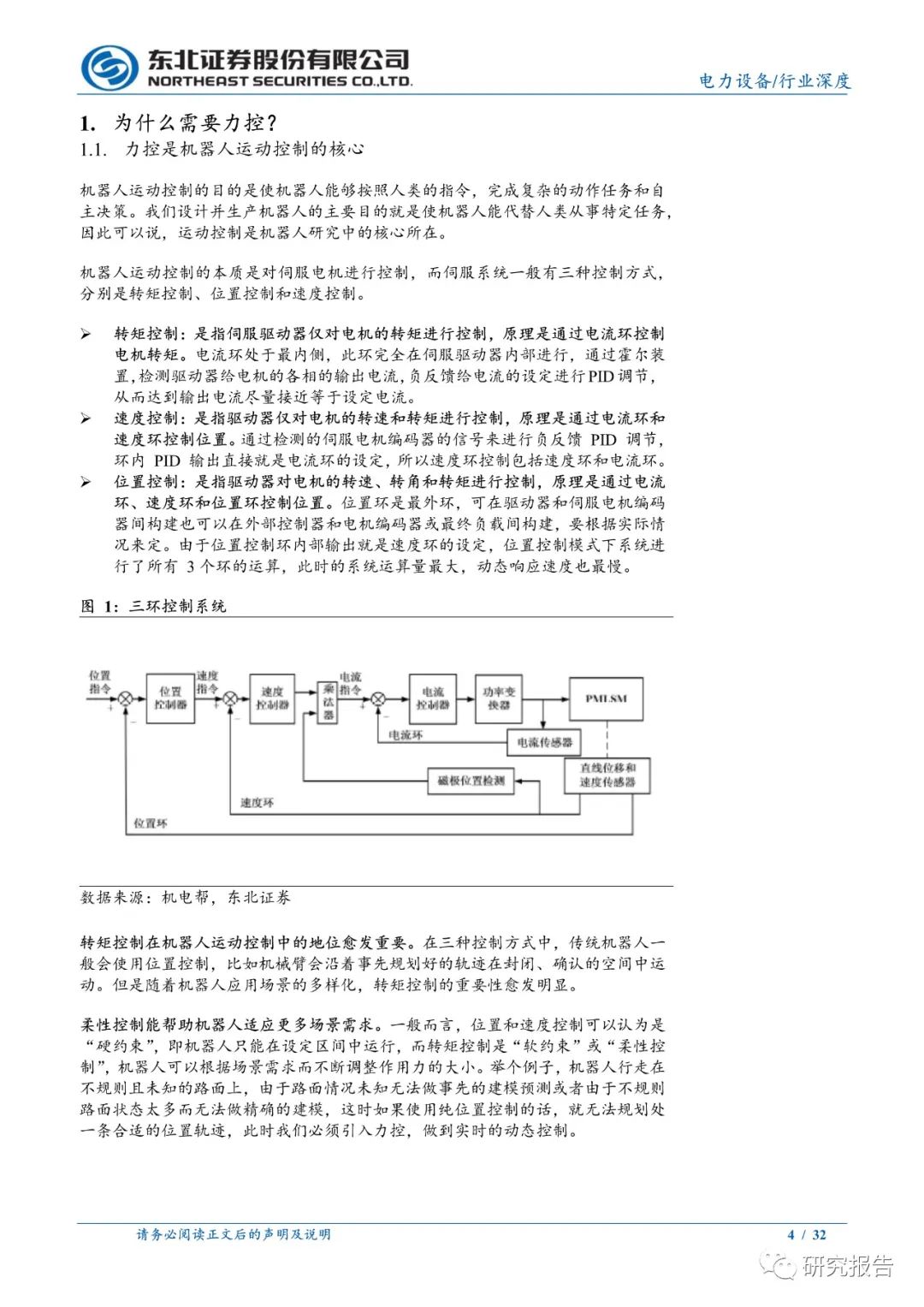
位置和速度控制可以认为是“硬约束”,即机器人只能在设定区间中运行,而转矩控制是“软约束”或“柔性控制”,机器人可以根据场景需求而不断调整作用力的大小,因此随着机器人应用场景的多样化,转矩控制的重要性愈发明显。
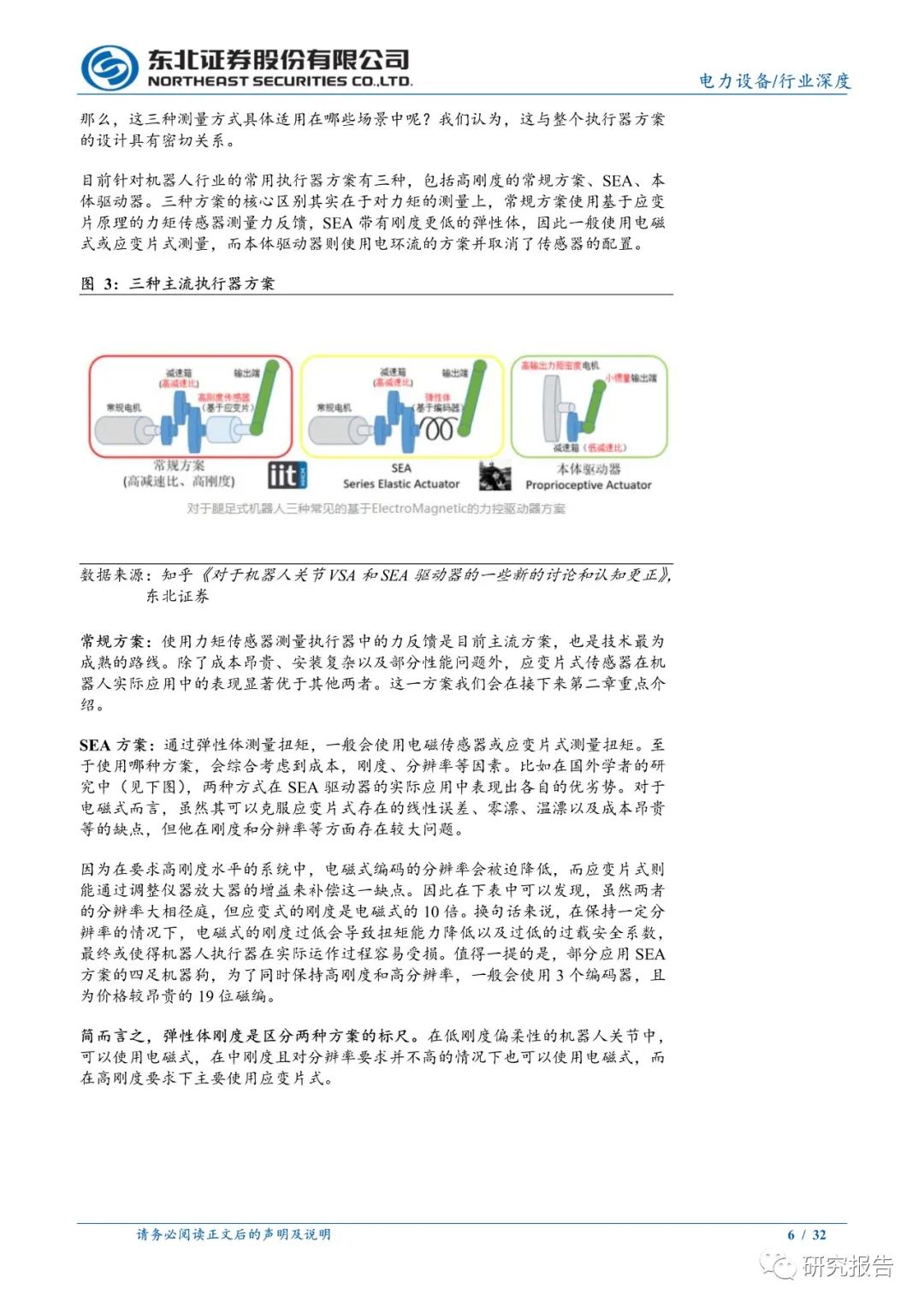
针对机器人硬件层面的力反馈测量主要有三种方式,应变片式力矩传感器、电磁式力矩传感器和弹性体。三种方案的选择和执行器方案有着密不可分的关系,常规方案使用基于应变片原理的力矩传感器测量力反馈,SEA 带有刚度更低弹性体,因此一般使用电磁式或应变片式测量,而本体驱动器则使用电环流方案并取消了传感器的配置。
文章内容


文琳编辑
免责声明:转载内容仅供读者参考,观点仅代表作者本人,不构成投资意见,也不代表本平台立场。若文章涉及版权问题,敬请原作者添加 wenlin-swl 微信联系删除。
为便于研究人员查找相关行业研究报告,特将2018年以来各期文章汇总。欢迎点击下面红色字体查阅!


今日导读:点击链接可查阅
