
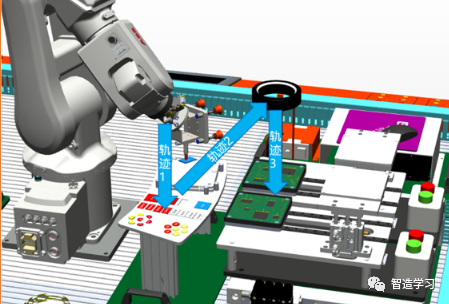
一、分拣流程
分拣流程中轨迹方向示意图如右图所示,其中轨迹1中工业机器人使用末轨端工具吸取异型芯片;迹2中工业机器人持芯片运动至视觉检测点位进行检测;轨迹3中工业机器人将检测后的异型芯片安装至电路板。
二、安装位置
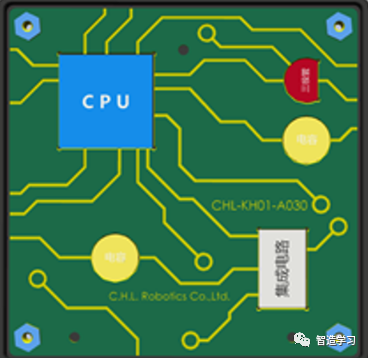
如图所示为各异型芯片的具体安装位置,包括CPU、集成电路、电容以及三极管四种芯片工件。
电路板A芯片安装位置
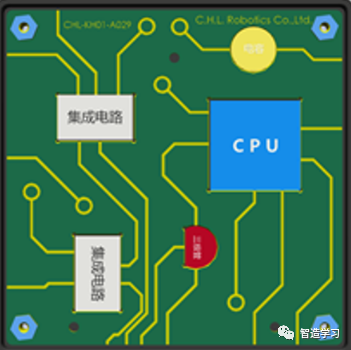
电路板B芯片安装位置
三、分拣工艺设计
工艺过程1: 以形状为依据的分拣
当前原料盘中的第一个 CPU存放位置随机放有CPU或集成电路芯片,我们需要利用视觉检测系统中的场景1 (场景组0) 来区分这两种芯片。
注意:为了保证芯片的吸取位置一致,初始状态时芯片的几何中心需要处于原料盘的几何中心尽量保持一致
当检测结果为 OK时,即检测结果符合 CPU的外形特点,此时将芯片安装在电路板 A的CPU安装位置:当检测结果为 NG时,即当前检测结果符合集成电路的外形特点,此时将芯片安装在电路板 A的集成电路安装位置。
工艺过程2: 以颜色为依据的分拣
当前原料盘中有两种颜色的 CPU,我们需要利用视觉检测系统中的场景 2 (场景组0)来区分这两种芯片。
当检测的CPU颜色为蓝色时,检测结果为 OK,此时工业机器人将芯片安装至电路板 A的CPU安装位置当检测的CPU颜色为白色时,检测结果为NG,此时]业机器人将芯片安装至电路板B的CPU安装位置。
来源:华航整理
福利资料:欧姆龙视觉检测软件及检测样本
对话框回复 “A001” 免费获取欧姆龙视觉检测软件及检测样本下载链接!
资料获取操作步骤如下:

免责声明:本公众号内容仅供行业交流学习参考使用,部分内容系网络转载,版权归原作者所有。如涉及版权问题,请及时联系我们,我们将第一时间删除内容!
