


еңЁеҫ®дҝЎе…¬дј—еҸ·зӣ®еүҚзҡ„з®—жі•дёӢпјҢдёәдәҶдёҚеӨұиҒ”пјҢеҸӘжңүдёҖдёӘеҠһжі•вҖ”вҖ”жҳҹж ҮвҳҶе…үеӨҙеҗӣгҖӮ
жӯҘйӘӨеҫҲз®ҖеҚ•пјҢеҲҶдёүжӯҘпјҡ
第дёҖжӯҘпјҡзӮ№еҮ»дёӢж–№йқўзҡ„гҖҗе…үеӨҙеҗӣSchellingгҖ‘
第дәҢжӯҘпјҡзӮ№еҮ»йЎөйқўеҸідёҠи§’зҡ„гҖҗ...гҖ‘
第дёүжӯҘпјҡи®ҫдёәжҳҹж ҮвҳҶпјҢйқһеёёж„ҹи°ўдҪ зҡ„ж”ҜжҢҒгҖӮ
дәәеҪўжңәеҷЁдәәжҳҜAIеңЁзЎ¬д»¶еұӮйқўиҗҪең°зҡ„йқһеёёйҮҚиҰҒзҡ„ж–№еҗ‘пјҢзү№ж–ҜжӢүеңЁ21е№ҙ8жңҲеҸ‘еёғиҮід»ҠејҖе§Ӣеҫ—еҲ°и¶ҠжқҘи¶ҠеӨҡзҡ„еёӮеңәе…іжіЁпјҢдҪҶеҪ“еүҚдҪҚзҪ®пјҢжҲ‘们и®Өдёәж— и®әжҳҜзү№ж–ҜжӢүжңәеҷЁдәәиҝҳжҳҜе…¶д»–зҡ„дәәеҪўжңәеҷЁдәәз»“жһ„и®ҫи®ЎеҸҠйӣ¶йғЁд»¶йҖүеһӢ并жңӘиҫҫеҲ°е®ҡеһӢзҠ¶жҖҒпјҢеҺҹеӣ еңЁдәҺеҪ“еүҚжңәеҷЁдәәзЎ¬+иҪҜboomжҲҗжң¬и·қзҰ»зңҹжӯЈйҮҸдә§зӣ®ж Үе”®д»·д»ҚжңүиҫғеӨ§и·қзҰ»пјҢйҷҚжң¬дёҺеҠҹиғҪе®һзҺ°зҡ„йҮҚиҰҒжҖ§жҳҫиҖҢжҳ“и§ҒгҖӮ
жүҖд»ҘпјҢеҪ“еүҚйҳ¶ж®өпјҢжҲ‘们и®ӨдёәдёҖж–№йқўпјҢжң¬ж¬Ўиҝӣе…Ҙзү№ж–ҜжӢүжңәеҷЁдәәBж ·йҳ¶ж®өзҡ„дҫӣеә”е•ҶдёәжңәеҷЁдәәеҹәзЎҖж Үзҡ„пјҲдёүиҠұ+йёЈеҝ—+з»ҝзҡ„+йӣ·еҲ©/йјҺжҷәпјүпјҢеҸҰдёҖж–№йқўпјҢжҲ‘们йңҖе…іжіЁиҫ№йҷ…жҠҖжңҜеҸҳеҢ–еёҰжқҘзҡ„ж–°е…ҙжҠ•иө„жңәйҒҮгҖӮ
1. зҺ°жңүзҡ„зү№ж–ҜжӢүдәәеҪўжңәеҷЁдәәд»·еҖјйҮҸеҲҶеёғеҸҠе…ій”®йӣ¶йғЁд»¶еӣһйЎҫ
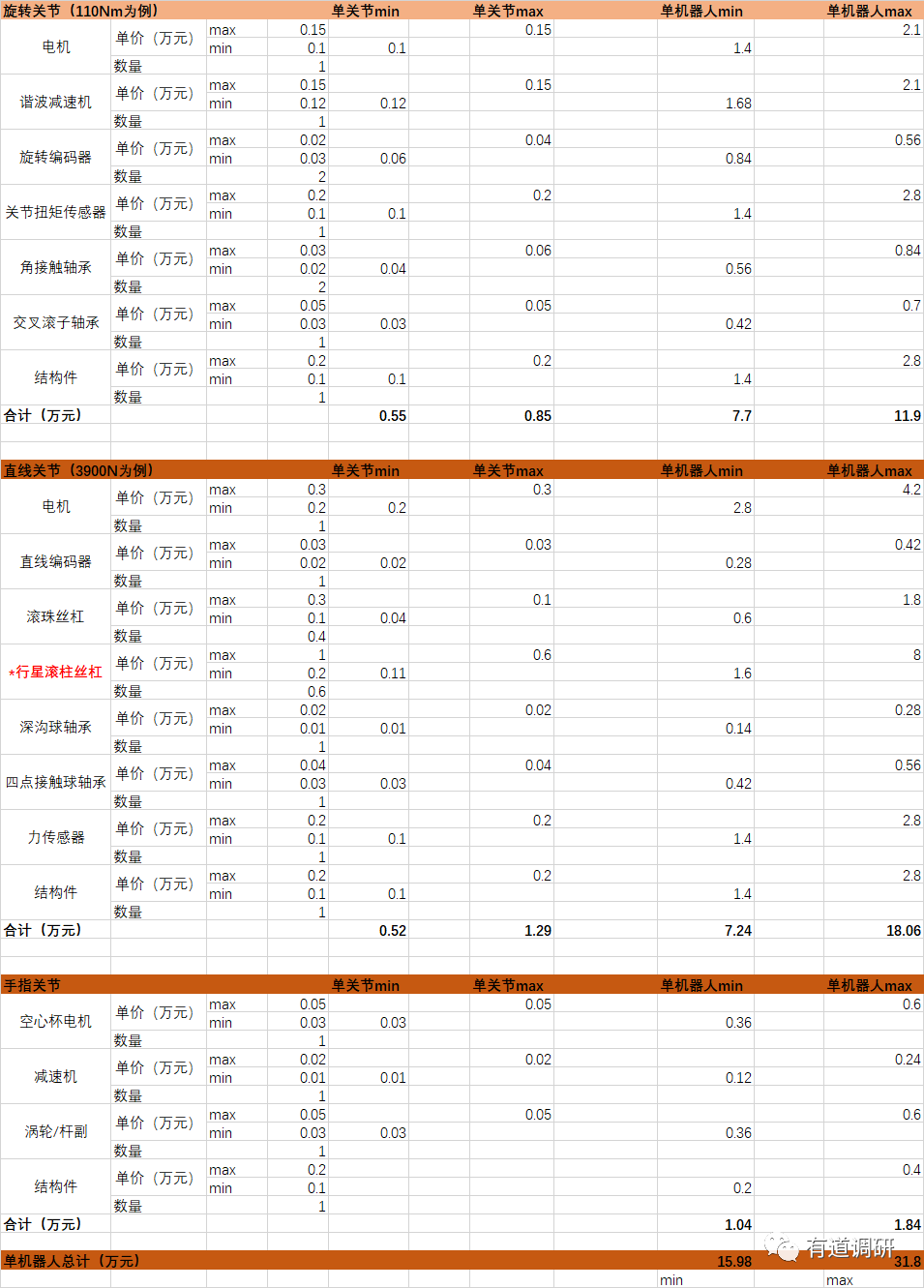
йҰ–е…ҲпјҢжҲ‘们з®ҖеҚ•еӣһйЎҫдёӢеҪ“еүҚзү№ж–ҜжӢүжңәеҷЁдәәзҡ„йӣ¶йғЁд»¶йҖүеһӢеҸҠд»·еҖјйҮҸеҲҶеёғпјҲеӣҫиЎЁ1пјүгҖӮеҪ“еүҚпјҢйӣ¶йғЁд»¶еҪ“дёӯеҚ жҜ”жңҖй«ҳзҡ„дёәзӣҙзәҝй©ұеҠЁгҖҒз”өжңәд»ҘеҸҠеҠӣзҹ©дј ж„ҹеҷЁгҖӮ
д»ҺеҠ е·ҘйҡҫеәҰжқҘиҜҙпјҢйҰ–е…ҲпјҢеӨ§и…ҝ+е°Ҹи…ҝжүҖиҰҒз”ЁеҲ°зҡ„иЎҢжҳҹж»ҡжҹұдёқжқ пјҲзӣ®еүҚеҚ•еҸ°жңәеҷЁдәәдҪҝз”Ёж•°йҮҸдёә8дёӘпјҢжҖ§иғҪжҳҫи‘—дјҳдәҺж»ҡзҸ дёқжқ пјҢи§ҒеӣҫиЎЁ2еҜ№жҜ”пјүйҡҫеәҰи¶…йў„жңҹпјҢж №жҚ®жңҖиҝ‘йғЁеҲҶеҺӮе•ҶеҸҚйҰҲпјҢеңЁеҗ‘TдәӨд»ҳиҜҘдә§е“Ғж–№жЎҲзҡ„иҝҮзЁӢдёӯпјҢж— и®әжҳҜи®ҫи®Ў/еҠ е·ҘйҡҫеәҰпјҢиҝҳжҳҜи®ҫеӨҮйҮҮиҙӯйҡҫеәҰпјҢйғҪеҸҜиғҪеӨ§е№…й«ҳдәҺж»ҡзҸ дёқжқ гҖӮTеңЁе…ЁзҗғиҢғеӣҙеҶ…з§ҜжһҒеҜ»жүҫиҜҘйӣ¶йғЁд»¶дҫӣеә”е•ҶгҖӮ
е…¶ж¬ЎпјҢе…іиҠӮжүӯзҹ©дј ж„ҹеҷЁд№ҹжҳҜйҮҚзӮ№йӣ¶йғЁд»¶пјҢе…¶иҝһжҺҘеҮҸйҖҹжңәдёҺе…іиҠӮпјҢйҮҸжөӢе…іиҠӮеӨ„зҡ„жүӯзҹ©еҸҳеҢ–пјҢе…¶зӣ®еүҚеӣҪеҶ…иғҪеӨҹеҒҡзҡ„е…¬еҸёж•°йҮҸйқһеёёжңүйҷҗпјҢдё»иҰҒеҺҹеӣ зі»жӯӨеүҚиҜҘйӣ¶йғЁд»¶дё»иҰҒз”ЁдәҺеҚҸдҪңжңәеҷЁдәә+жұҪиҪҰеҒҮдәәжөӢиҜ•+жү“зЈЁжңәеҷЁдәәзӯүеңәжҷҜпјҢеұһдәҺе°Ҹдј—еёӮеңәдә§е“ҒпјҢжүҖд»Ҙзӣ®еүҚTеңЁиҜҘзҺҜиҠӮзҡ„йҷҚжң¬иҜүжұӮйў„и®Ўд№ҹиҫғдёәиҝ«еҲҮгҖӮ
еӣҫиЎЁ1пјҡtesla botд»·еҖјйҮҸжӢҶеҲҶдј°з®—иЎЁ
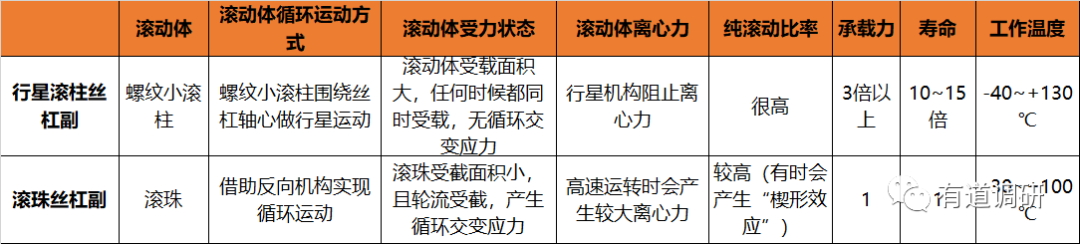
еӣҫиЎЁ2пјҡиЎҢжҳҹж»ҡжҹұдёқжқ дёҺж»ҡзҸ дёқжқ зҡ„еҜ№жҜ”
2. йҮҚиҰҒи®әж–ҮдёӯжҳҫзӨәзҡ„йҮҚиҰҒиҫ№йҷ…жңүе“Әдәӣпјҹ
иҝ‘жңҹпјҢUCLAпјҲеҠ е·һеӨ§еӯҰжҙӣжқүзҹ¶еҲҶж ЎпјүZhuпјҢTaoyuanminеҸ‘еёғе…¶еҚҡеЈ«и®әж–ҮпјҢе…¶еёҲд»ҺDennis W.HongпјҢеҗҺиҖ…дёәеҠ е·һеӨ§еӯҰжҙӣжқүзҹ¶еҲҶж Ўжңәжў°е’ҢиҲӘз©әиҲӘеӨ©е·ҘзЁӢж•ҷжҺҲгҖҒRoMeLaжңәеҷЁдәәе®һйӘҢе®Өдё»д»»гҖӮз”ұдәҺRoMeLaеңЁи…ҝи¶іжңәеҷЁдәәйўҶеҹҹжҺўзҙўйўҮеӨҡпјҢе…¶жңҖж–°и®әж–ҮжҲҗжһңжңүдёҖе®ҡеҸҜеҖҹйүҙж„Ҹд№үпјҲдҪҶеҝ…йЎ»иҜҙпјҢ并йқһд»ЈиЎЁе…¶жҳҜжңҖз»ҲеҪўжҖҒпјүгҖӮ
PART1пјҡIntroduction
1пјүи°җжіў+еҠӣзҹ©дј ж„ҹжҲҗдёәйҮҚиҰҒдәәеҪўжңәеҷЁдәәи§ЈеҶіж–№жЎҲпјҢдјҳеҠҝжҳҺжҳҫпјҡи°җжіў+еҠӣзҹ©дј ж„ҹеҷЁжөӢйҮҸеҸҠжҺ§еҲ¶еҠӣзҹ©зҒөж•ҸеәҰй«ҳ+еҮҶзЎ®жҖ§ејәгҖӮ然иҖҢпјҢе…·жңүй«ҳйҪҝиҪ®еҮҸйҖҹжҜ”зҡ„жңәеҷЁдәәжӣҙйҖӮеҗҲзј“ж…ўдё”зӣёеҜ№йқҷжӯўзҡ„иҝҗеҠЁгҖӮиҝҷжҳҜз”ұдәҺи°җжіўй©ұеҠЁеҷЁе’ҢF/Tдј ж„ҹеҷЁеҫҲи„ҶејұпјҢжҳ“еҸ—еҲ°еҶІеҮ»гҖӮжӯӨеӨ–пјҢйҪҝиҪ®з®ұзҡ„й«ҳжғҜжҖ§е’ҢдҪҺж•ҲзҺҮдҪҝе…¶ж— жі•еҗёж”¶жҜҸж¬Ўи„ҡиҗҪең°ж—¶йғҪдјҡеҸ‘з”ҹзҡ„еҶІеҮ»иҪҪиҚ·гҖӮ
2пјүеӣ жӯӨпјҢйҷӨдәҶи°җжіў+еҠӣзҹ©дј ж„ҹпјҢз§‘з ”йўҶеҹҹд№ҹеңЁејҖеҸ‘жӣҙеӨҡзҡ„ж–№жЎҲпјҢSEAжңүжҪңеҠӣпјҢдёӢиӮўдёӯж»ҡзҸ дёқжқ еңЁжҹҗдәӣжғ…еҶөдёӢжҳҜйҰ–йҖүгҖӮ
в‘ SEAпјҢе…ЁеҗҚseries elastic acuatorsпјҢдёІиҒ”еј№жҖ§жү§иЎҢжңәжһ„пјҢеңЁеңЁйҪҝиҪ®з®ұе’ҢиҪҪиҚ·д№Ӣй—ҙеј•е…ҘдёҖдёӘеј№жҖ§е…ғ件пјҲеј№з°§пјүпјҢйҖҡиҝҮжөӢйҮҸеј№жҖ§е…ғ件дёӯзҡ„еҒҸиҪ¬пјҢеҸҜд»ҘдҪңдёәз»“жһңжқҘиҜ„дј°еҠӣгҖӮиҝҷдёӘж–№жЎҲжҪңеҠӣиҫғеӨ§пјҢеј№з°§еҜ№дәҺеӨ–йғЁеҶІеҮ»еҠӣжңүзј“еҶІдҪңз”ЁгҖӮ
в‘Ў proprioceptive acuatorsпјҲжң¬дҪ“жү§иЎҢжңәжһ„пјүпјҢиҝҷжҳҜдёҖз§ҚжҜ”иҫғдј з»ҹзҡ„ж–№ејҸпјҢе°ұжҳҜеҲ©з”ЁжңәеҷЁдәәз”өжңәиҮӘиә«зҡ„з”өжөҒжқҘжөӢйҮҸеҸҠжҺ§еҲ¶еҠӣзҹ©пјҢд»ҺиҖҢиҝӣиЎҢж“ҚдҪңеҲӨж–ӯпјҢиҝҷз§Қж–№ејҸзҡ„й—®йўҳеңЁдәҺзҒөж•ҸеәҰдҪҺпјҢд»ҺеӣҫиЎЁ3жқҘзңӢпјҢиҝҷз§Қж–№ејҸжңҖдёҚеҲ©дәҺеҪўжҲҗжӣҙй«ҳзҡ„еҠӣзҹ©пјҲtorqueпјүж°ҙе№ігҖӮ
в‘ў ж–№жЎҲдёәж¶ІеҺӢдј еҠЁпјҢиҝҷз§Қж–№ејҸзҡ„й—®йўҳеңЁдәҺж¶ІеҺӢжіөгҖҒйҳҖй—Ёе’ҢиҪҜз®Ўзҡ„иҝҷдёҖж•ҙеҘ—зі»з»ҹзҡ„еӨҚжқӮжҖ§йҡҫд»Ҙе…ӢжңҚгҖӮ
в‘ЈВ еңЁжңәеҷЁдәәдёӢиӮўејҖеҸ‘дёӯпјҢеңЁжҹҗдәӣжғ…еҶөдёӢпјҢзәҝжҖ§жү§иЎҢеҷЁжҳҜйҰ–йҖүпјҢеӣ дёәе®ғ们жҸҗдҫӣдәҶеҚ“и¶Ҡзҡ„е°ҒиЈ…йҖүйЎ№пјҢ并且ж»ҡзҸ дёқжқ ж—ўй«ҳж•ҲеҸҲжҳ“дәҺдҪҝз”ЁгҖӮ
еӣҫиЎЁ3пјҡиЎҢжҳҹж»ҡжҹұдёқжқ дёҺж»ҡзҸ дёқжқ зҡ„еҜ№жҜ”
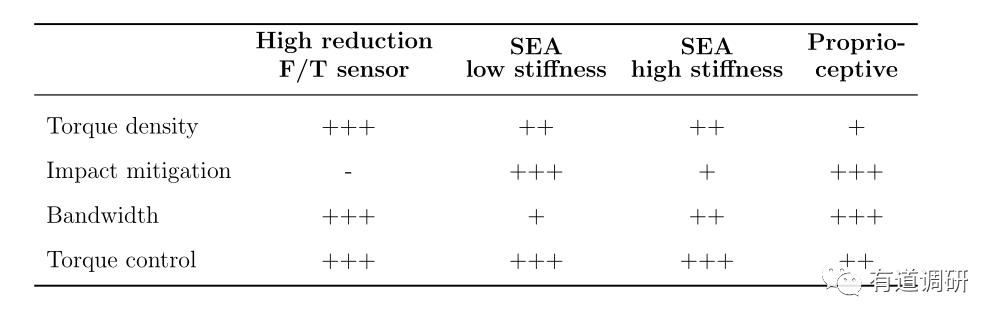
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–ҮпјҢпјҲstiffnessдёәеҲҡжҖ§пјҢhigh reduction FT sensorеҚідёәй«ҳж•ҲеҮҸйҖҹжңә+еҠӣзҹ©дј ж„ҹж–№жЎҲпјҢtorque densityдёәеҠӣзҹ©еҜҶеәҰпјҢи¶Ҡй«ҳи¶ҠеҘҪпјҢimpact mitigationдёәеҜ№еӨ–йғЁеҶІеҮ»зҡ„еҮҸе°‘иғҪеҠӣпјҢи¶Ҡй«ҳи¶ҠеҘҪпјү
еӣҫиЎЁ4пјҡдёҚеҗҢдј еҠЁж–№ејҸеҜ№жҜ”пјҲе…¶дёӯhigh power BLDCдёәй«ҳжҖ§иғҪж— еҲ·зӣҙжөҒз”өжңәпјү
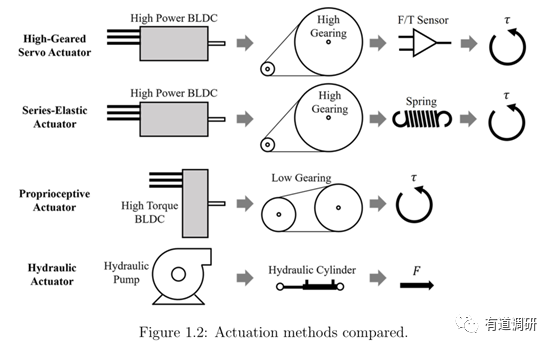
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
PART2пјҡActuator DesignпјҲжү§иЎҢжңәжһ„пјҢд№ҹе°ұжҳҜз”өжңә+еҮҸйҖҹжңәзӯүзҡ„и®ҫи®Ўпјү
1пјүз”өжңәи®ҫи®ЎпјҡйҮҚзӮ№еңЁдәҺжҸҗеҚҮз”өжңәзҡ„ж°”йҡҷеҚҠеҫ„пјҢеҺҹеӣ еңЁдәҺпјҡз”өжңәжүӯзҹ©П„дёҺе…¶ж°”йҡҷеҚҠеҫ„r 2gжҲҗжӯЈжҜ”пјҢ并дёҺз”өжңәе Ҷж Ҳй•ҝеәҰlsжҲҗзәҝжҖ§жҜ”дҫӢгҖӮжҢүз…§и®әж–ҮиЎЁиҝ°жқҘзңӢпјҢж°”йҡҷеҚҠеҫ„йҖӮй…ҚдәҺдҪҺзҡ„еҮҸйҖҹжңәзҡ„еҮҸйҖҹжҜ”пјҢеҜ№дәҺз”өжңәеі°еҖјжүӯзҹ©жІЎжңүеӨӘеӨ§е·®еҲ«пјҢеӣ иҖҢеңЁз»ҙжҢҒж ёеҝғз”өжңәжҢҮж Үеі°еҖјжүӯзҹ©зҡ„еҗҢж—¶пјҢеҸҜд»ҘйҖӮеҪ“зЁӢеәҰй…ҚзҪ®дҪҺеҮҸйҖҹжҜ”зҡ„еҮҸйҖҹжңәгҖӮ
еҺҹж–Үйҳҗиҝ°пјҡжү§иЎҢжңәжһ„и®ҫи®ЎеҲҶжһҗзҡ„еҸҰдёҖйғЁеҲҶжҳҜзЎ®е®ҡжңҹжңӣзҡ„еҮҸйҖҹжҜ”гҖӮеҒҮи®ҫдёҖдёӘеёҰжңүдј з»ҹз”өжңәзҡ„жү§иЎҢеҷЁпјҢйҪҝиҪ®еҮҸйҖҹдёә128:1гҖӮйҖҡиҝҮеўһеҠ ж°”йҡҷеҚҠеҫ„4еҖҚпјҢжүҖйңҖзҡ„йҪҝиҪ®еҮҸйҖҹеҮҸе°‘еҲ°8:1гҖӮз”ұжӯӨдә§з”ҹзҡ„жү§иЎҢеҷЁе°Ҷе…·жңүзӣёеҗҢзҡ„еі°еҖјжүӯзҹ©гҖӮ然иҖҢпјҢеҮҸйҖҹжҜ”дёә8:1зҡ„йҪҝиҪ®еҮҸйҖҹжңәдёҺ128:1зҡ„йҪҝиҪ®еҮҸйҖҹжңәзӣёжҜ”пјҢе°Ҷе…·жңүжӣҙй«ҳзҡ„ж•ҲзҺҮгҖӮиҝҷиҜҙжҳҺпјҡе°Ҷж°”йҡҷеҚҠеҫ„ж”ҫеӨ§пјҢжҲ‘们еҸҜд»ҘдҪҝз”ЁиҰҒжұӮжӣҙдҪҺзҡ„еҚ•зә§иЎҢжҳҹеҮҸйҖҹжңәгҖӮ
дёҺжӯӨеҗҢж—¶пјҢжңүеӨ§зҡ„ж°”йҡҷеҚҠеҫ„з”өжңәеҲӣйҖ дәҶжӣҙеӨ§зҡ„з©әзҷҪз©әй—ҙпјҢеҫ„еҗ‘еөҢеҘ—иҪ¬еӯҗгҖҒе®ҡеӯҗе’ҢйҪҝиҪ®з®ұзҡ„и®ҫи®ЎдҪҝеҫ—жү§иЎҢеҷЁеҢ…иЈ…е…·жңүеҫҲй«ҳзҡ„з©әй—ҙж•ҲзҺҮгҖӮ
еӣҫиЎЁ5пјҡз”өжңәжүӯзҹ©дёҺж°”йҡҷеҚҠеҫ„пјҲr 2gпјүдёҺе Ҷж Ҳй•ҝеәҰlsжҲҗжӯЈзӣёе…і
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
2пјүеҮҸйҖҹжңәи®ҫи®ЎпјҡеңЁеҠ еӨ§з”өжңәж°”йҡҷеҚҠеҫ„зҡ„и®ҫи®Ўд№ӢдёӢпјҢеҮҸйҖҹжңәеҸҜд»ҘдёҚеҝ…дҪҝз”ЁеҮҸйҖҹжҜ”й«ҳзҡ„й«ҳжҖ§иғҪеҮҸйҖҹжңәгҖӮз”ұдәҺж‘©ж“Ұе’ҢеҸҚе°„жғҜжҖ§пјҢеңЁй«ҳеҮҸйҖҹжҜ”и®ҫи®Ўд№ӢдёӢпјҢдј з»ҹзҡ„жү§иЎҢеҷЁеҫҲе®№жҳ“еӣ еҶІеҮ»иҪҪиҚ·иҖҢжҚҹеқҸгҖӮиҖҢдҪҺеҮҸйҖҹжҜ”зҡ„и®ҫи®ЎеҸҜд»ҘжүҝеҸ—е’Ңдј йҖ’еҶІеҮ»еҠӣйҖҡиҝҮз”өжңәиҖҢдёҚз ҙеқҸеҮҸйҖҹжңәгҖӮдҪҺеҮҸйҖҹжҜ”зҡ„иЎҢжҳҹеҮҸйҖҹжңәеҚ•д»·жҳҫи‘—дҪҺдәҺи°җжіўгҖҒRVзӯүпјҢдҪҶжӣҙйҖӮз”ЁеҜ№дәҺйҖҹеәҰиҰҒжұӮдҪҺзҡ„еңәжҷҜпјҢеӣ иҖҢеӨ§ж°”йҡҷеҚҠеҫ„+дҪҺеҮҸйҖҹжҜ”жӣҙйҖӮеҗҲдәҺжңәеҷЁдәәдёӢиӮўгҖӮ
еӣҫиЎЁ6пјҡй«ҳеҮҸйҖҹжҜ”vsдҪҺеҮҸйҖҹжҜ”еҮҸйҖҹжңәдҪҝз”Ёд№ӢдёӢдјҙйҡҸз”өжөҒжҸҗеҚҮжүӯзҹ©зҡ„еҸҳеҢ–пјҲдёҠеӣҫдҪҝз”ЁеҮҸйҖҹжңәеҮҸйҖҹжҜ”дёә225:1пјҢдёӢеӣҫдёәдҪҺеҮҸйҖҹжҜ”пјҢеҸҚеҗ‘еҠӣд№ӢдёӢпјҢдёӢеӣҫжүӯзҹ©дёҠеҚҮжӣІзәҝеҘҪеҫҲеӨҡпјү
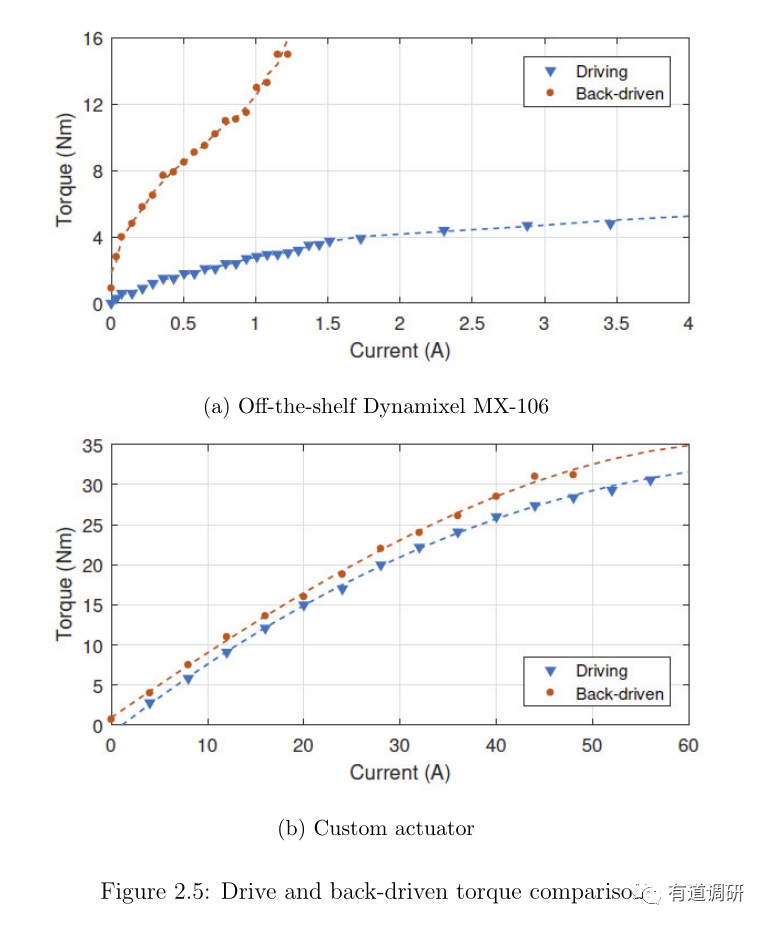
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
3пјүзғӯз®ЎзҗҶпјҡз”ұдәҺиҝҮеәҰз„ҰиҖіеҠ зғӯпјҢжү§иЎҢжңәжһ„дёҚиғҪй•ҝж—¶й—ҙз»ҙжҢҒеі°еҖјиҙҹиҪҪгҖӮдёәдәҶи§ЈеҶіиҝҷдёӘй—®йўҳпјҢжңәеҷЁдәәйңҖиҰҒе№ҝжіӣзҡ„еҶ·еҚҙзі»з»ҹжқҘдёҚй—ҙж–ӯең°иҝҗиЎҢгҖӮеңЁжү§иЎҢеҷЁеӨ–еЈідёҠзҡ„еҶ…зҪ®еҶ·еҚҙеүӮйҖҡйҒ“е…Ғи®ёе®ғ们дҪҝз”ЁйӣҶдёӯеҶ·еҚҙзі»з»ҹиҝӣиЎҢж¶ІдҪ“еҶ·еҚҙгҖӮ
PART3пјҡMechanical DesignпјҲжңәеҷЁдәәжңәжў°з»“жһ„и®ҫи®Ўпјү
1пјүдёӢиӮўи®ҫи®ЎпјҲеҚій«ӢйғЁгҖҒи…ҝйғЁгҖҒи„ҡйғЁпјү
дёӢиӮўи®ҫи®ЎжңҖдёәйҮҚиҰҒпјҢеҺҹеӣ дёәеңЁи®әж–Үеј•иЁҖйғЁеҲҶпјҢеӨ–йғЁеҶІеҮ»еҠӣеҜ№дәҺй«ҳжҖ§иғҪеҮҸйҖҹжңә+дј ж„ҹеҷЁзҡ„еҶІеҮ»жӣҙеӨҡиЎЁзҺ°дёәдёӢиӮўгҖӮ
жң¬зҜҮи®әж–ҮдёӯпјҢеңЁдёӢиӮўзҡ„еҲӣж–°дёҠпјҢдё»иҰҒеҢ…жӢ¬пјҡ
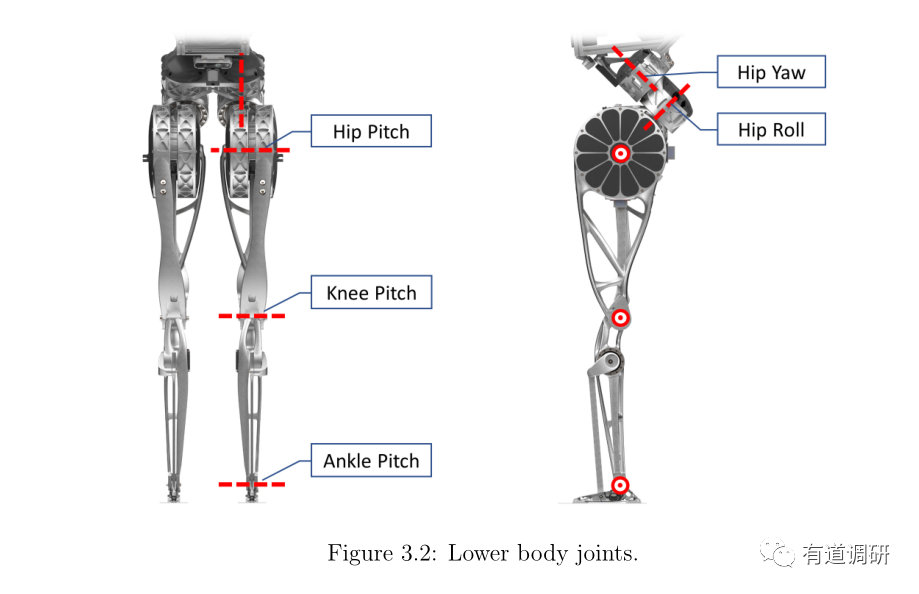
в‘ еҺ»йҷӨдёҖдёӘи„ҡиёқе…іиҠӮпјҢдёӢиӮўиҮӘз”ұеәҰд»Һ6иҮӘз”ұеәҰеҸҳдёә5иҮӘз”ұеәҰгҖӮдёӢиӮў6иҮӘз”ұеәҰеҲҶеёғеңЁпјҡй«Ӣе…іиҠӮеҒҸиҲӘпјҲyawпјҢжҺ§еҲ¶й«Ӣжң¬иә«зҡ„иҝҗеҠЁпјүгҖҒй«Ӣе…іиҠӮж»ҡиҪ¬пјҲrollпјҢеӣҫзӨәиҪ¬зӣҳдҪҚзҪ®пјҢжҺ§еҲ¶и…ҝйғЁеүҚеҗҺж‘ҶеҠЁпјүгҖҒй«Ӣе…іиҠӮдҝҜд»°пјҲpitchпјҢжҺ§еҲ¶и…ҝйғЁе·ҰеҸіж‘ҶеҠЁпјүгҖҒиҶқе…іиҠӮдҝҜд»°гҖҒиёқе…іиҠӮдҝҜд»°е’Ңиёқе…іиҠӮж»ҡиҪ¬пјҲи§ҒеӣҫиЎЁ7пјүгҖӮ
зҺ°еңЁиҖғиҷ‘зҡ„жҳҜе°Ҷи„ҡйғЁзҡ„ж»ҡеҠЁиҮӘз”ұеәҰзңҒз•ҘпјҢеҺҹеӣ жҳҜе…¶еңЁжңәеҷЁдәәеҝ«иө°жҲ–иҖ…еҘ”и·‘ж—¶еҹәжң¬дёҠжңӘиў«з”ЁеҲ°пјҢиҝҷж ·еҸҜд»ҘеҮҸе°‘жңәеҷЁдәәеңЁеҘ”и·‘ж—¶и…ҝйғЁдёҺиҜҘе…іиҠӮзҡ„ж’һеҮ»д»ҘеҸҠең°йқўеҶІеҮ»еҠӣгҖӮдҪҶиҝҷж ·еҸҜиғҪдјҡдё§еӨұдёҖе®ҡзҡ„е№іиЎЎжҖ§гҖӮ
еӣҫиЎЁ7пјҡдёӢиӮўиҮӘз”ұеәҰеҲҶеёғеӣҫ
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
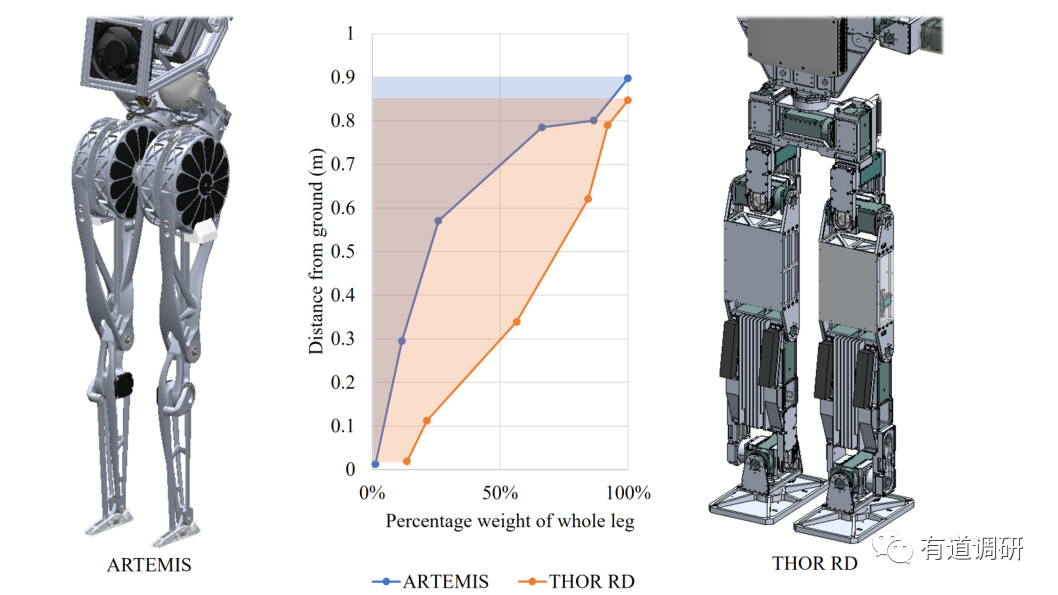
в‘Ў еҸҰдёҖз§ҚжҳҜз®ҖеҚ•ең°е°Ҷй«ӢйғЁеҒҸиҲӘиҪҙпјҲyawпјүе’Ңй«ӢйғЁж»ҡиҪҙпјҲrollпјүе‘ҲзҺ°yawеҗ‘еүҚеҖҫж–ң45еәҰгҖӮйҖҡиҝҮиҝҷж ·еҒҡпјҢиЎҢиө°ж—¶дёӨдёӘжү§иЎҢеҷЁд№Ӣй—ҙзҡ„жүӯзҹ©еҲҶй…ҚжӣҙеҠ еқҮеҢҖгҖӮеӣ жӯӨпјҢдёӨдёӘжү§иЎҢеҷЁеҸҜд»ҘдҪҝз”ЁзӣёеҗҢзҡ„жү§иЎҢеҷЁжЁЎеқ—пјҢиҖҢж— йңҖзү№еҲ«е®ҡеҲ¶гҖӮиҝҷз§Қи®ҫи®Ўзҡ„еҸҰдёҖдёӘеҘҪеӨ„жҳҜпјҢеҒҸиҲӘе’Ңж»ҡеҠЁй©ұеҠЁеҷЁзҺ°еңЁйҡҗи—ҸеңЁйӘЁзӣҶз»“жһ„зҡ„еҗҺйқўгҖӮ
иҝҷз»ҷиӮЎйӘЁжҸҗдҫӣдәҶжӣҙеҘҪзҡ„й«Ӣе…іиҠӮдҝҜд»°иҝҗеҠЁиҢғеӣҙзҡ„й—ҙйҡҷпјҢиҝҷжңүеҲ©дәҺеңЁиҶқзӣ–йқ иҝ‘иғёйғЁзҡ„иҝҗеҠЁпјҢеҰӮдёӢи№ІиҝҗеҠЁгҖӮи®әж–Үе°Ҷе…¶и®ҫи®ЎжңәеҷЁдәәARTEMISдёҺзӣҙзәҝи®ҫи®ЎжңәеҷЁдәәTHOR RDиҝӣиЎҢеҜ№жҜ”пјҢеҪ“и¶ійғЁзҰ»ең°дҪҚ移йҖҗжӯҘеҮҸе°‘ж—¶пјҢи…ҝйғЁжүҝеҸ—еҠӣзҡ„зҷҫеҲҶжҜ”йғҪдјҡеҮҸе°‘пјҢдҪҶARTEMISеҮҸе°‘жӣҙеҝ«пјҢиҜҙжҳҺе…¶и…ҝйғЁеҠӣжүҝеҸ—жӣҙе°‘пјҢжӣҙжңүзӣҠдәҺжҸҗеҚҮжҖ§иғҪгҖҒ延й•ҝеҜҝе‘ҪгҖӮ
еӣҫиЎЁ8пјҡй«ӢйғЁеҖҫи§’и®ҫи®ЎдёҺзӣҙи§’и®ҫи®Ўзҡ„жҖ§иғҪеҜ№жҜ”пјҲartemisжңәеҷЁдәәеҚідёәи®әж–Үи®ҫи®ЎжңәеҷЁдәәпјҢй«ӢйғЁеҒҸиҲӘиҪҙдёҺж»ҡиҪҙе‘ҲзҺ°45%пјҢthor rdе°ұжҳҜйҖҡеёёеһӮзӣҙи®ҫи®Ўзҡ„жңәеҷЁдәәпјү
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
еңЁиҝҷз§Қи®ҫи®Ўд№ӢдёӢпјҢи®әж–Үеј•е…ҘдәҶиҝһжқҶз»“жһ„+з”өжңә+иЎҢжҳҹеҮҸйҖҹжңәгҖӮи®әж–Үи®ҫи®ЎдёҚжҳҜе°Ҷжү§иЎҢеҷЁпјҲе°ұжҳҜз”өжңә+еҮҸйҖҹпјүе®ҡдҪҚеңЁе…іиҠӮдёҠпјҢиҖҢжҳҜдҪҝз”ЁиҝһжқҶжқҘ移еҠЁжү§иЎҢеҷЁзҡ„иҝ‘з«Ҝ并е°ҶиҝҗеҠЁеҗ‘дёӢдј йҖ’еҲ°е®һйҷ…е…іиҠӮгҖӮиҶқе…іиҠӮжү§иЎҢеҷЁеҗ‘дёҠ移еҠЁиҮідёҺй«Ӣе…іиҠӮжү§иЎҢеҷЁеҗҢиҪҙпјҢиҖҢиёқе…іиҠӮжү§иЎҢеҷЁйҮҚж–°е®ҡдҪҚиҮіжӣҙйқ иҝ‘иҶқе…іиҠӮзҡ„дҪҚзҪ®гҖӮ
иҝһжқҶдј еҠЁдёҚжҳҜдёҖз§Қж–°йІңзҡ„дј еҠЁж–№ејҸпјҢеёёз”Ёзҡ„ж—ӢиҪ¬еҸҳзӣҙзәҝзҡ„дј еҠЁж–№ејҸеҢ…жӢ¬пјҡеёҰдј еҠЁгҖҒй“ҫжқЎдј еҠЁгҖҒйҪҝиҪ®йҪҝжқЎдј еҠЁгҖҒиҝһжқҶдј еҠЁгҖҒдёқжқ дј еҠЁгҖҒжӣІжҹ„жңәжһ„зӯүпјҢе…¶дёҺдёқжқ дёҖж ·е№¶йқһж–°е…ҙжҰӮеҝөгҖӮдҪҶиҝһжқҶеңЁдәәеҪўжңәеҷЁдәәеҪ“дёӯеҸҜиғҪдјҡз”ЁеҲ°зҡ„еҺҹеӣ жҳҜжҜ”зҡ®еёҰеҸҠй“ҫжқЎзӯүз»“жһ„з®ҖеҚ•гҖӮ
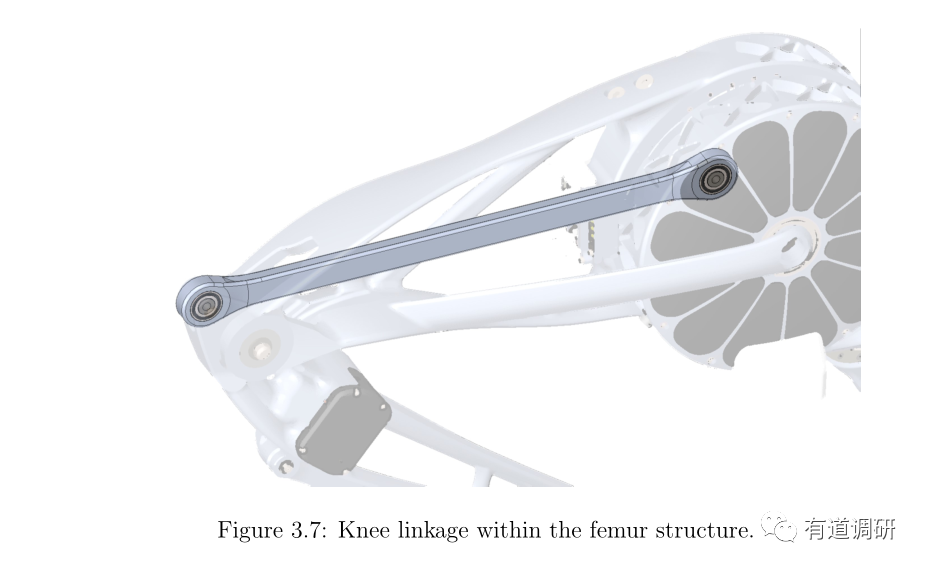
и®әж–Үејәи°ғпјҢдёәдәҶз®ҖеҚ•иө·и§ҒпјҢйҮҮз”ЁдәҶе№іиЎҢеӣӣжқҶжңәжһ„пјҢдҪҶзүәзүІдәҶиҝҗеҠЁиҢғеӣҙгҖӮиҝҷжҳҜеӣ дёәеҪ“е…іиҠӮжҺҘиҝ‘еҘҮзӮ№ж—¶пјҢиҝһжқҶеҠӣжҖҘеү§еўһеҠ пјҢйҷҗеҲ¶дәҶеҸҜз”Ёжүӯзҹ©гҖӮеҰӮеӣҫ3.8жүҖзӨәпјҢйҮҮз”Ёи®ҫи®Ўзҡ„иҝһжқҶеҠӣдёә15kNжқҘзЎ®е®ҡиҝһжқҶзҡ„е°әеҜёгҖӮеӨ§зәҰ140еәҰзҡ„иҝҗеҠЁиҢғеӣҙеҸҜд»ҘеңЁдёҚеҪұе“ҚиҶқе…іиҠӮеі°еҖјжүӯзҹ©зҡ„жғ…еҶөдёӢе®һзҺ°гҖӮ
еҗҢж—¶пјҢдёәдәҶе°ҪйҮҸеҮҸе°‘дј иҫ“жҚҹеӨұпјҢи®әж–Үеј•е…Ҙе…ЁиЎҘж»ҡеӯҗиҪҙжүҝ(IKO NAG4901UU)з”ЁдҪңжқҶз«ҜгҖӮдёҺж»‘еҠЁиҪҙжүҝзӣёжҜ”пјҢж»ҡеӯҗиҪҙжүҝе…·жңүжӣҙдҪҺзҡ„ж‘©ж“Ұд»ҘеҸҠдҫ§йҡҷпјҢд»ҘзЁҚйҮҚзҡ„йҮҚйҮҸдёәд»Јд»·гҖӮж»ҡеӯҗиҪҙжүҝд№ҹжңүзәҰжқҹиҝҗеҠЁеңЁе№ійқўеҶ…пјҢдҪҝеұҲжӣІдёҚеӨӘеҸҜиғҪеҸ‘з”ҹгҖӮ
еӣҫиЎЁ9пјҡиҶқзӣ–е…іиҠӮдёҺй«Ӣж»ҡеҠЁе…іиҠӮд№Ӣй—ҙзҡ„иҝһжқҶи®ҫи®ЎпјҲеӨ§и…ҝеҶ…йғЁз»“жһ„пјү
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
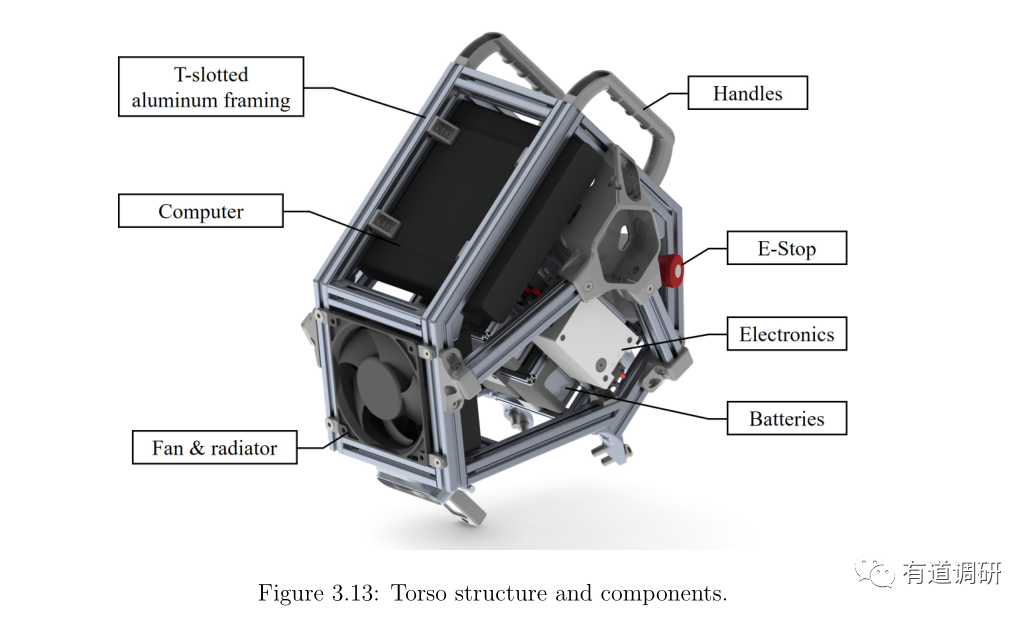
2пјүиәҜе№Іи®ҫи®ЎпјҡйҮҚиҰҒзЁӢеәҰдҪҺдәҺдёӢиӮўпјҢж ёеҝғеңЁдәҺиҪ»йҮҸеҢ–еҸҠеҸҜи°ғж•ҙжҖ§пјҢTеһӢж§Ҫз»“жһ„ејәдәҺз„Ҡз®ЎгҖӮTеһӢж§ҪдёәдёҖз§Қеӣәе®ҡж–№ејҸпјҲи§ҒеӣҫиЎЁ10дёӯзҡ„T-slotted aluminum framingжүҖжҢҮе°Ҹж–№еқ—пјҢе°әеҜёдёә20mm*20mmпјүпјҢдёҚжҳҜз”Ёз„ҠжҺҘе®Ңе…Ёз„ҠзүўпјҢдҪҝз”ЁtеһӢж§ҪжЎҶжһ¶д»Јжӣҝз„Ҡз®Ўз»“жһ„зҡ„еҘҪеӨ„жҳҜпјҢеҰӮжһңиҰҒеңЁд»ҘеҗҺзҡ„ж—¶й—ҙзӮ№ж·»еҠ ж–°зҡ„д»ӘеҷЁпјҢе®үиЈ…еҠҹиғҪеҸҜд»ҘеҫҲе®№жҳ“ең°ж·»еҠ жҲ–дҝ®ж”№гҖӮ
зҺ°жҲҗзҡ„ж”Ҝжһ¶пјҢзҙ§еӣә件е’Ң硬件д№ҹдҪҝе…¶жҳ“дәҺи®ҫи®ЎпјҢеҠ е·ҘиҰҒжұӮжңҖдҪҺгҖӮжүӢжҹ„е®үиЈ…еңЁиәҜе№Ізҡ„йЎ¶йғЁиғҢйғЁпјҢдҫҝдәҺиҝҗиҫ“еҸҠе®үиЈ…гҖӮжҺ§еҲ¶дё»жңәгҖҒзғӯз®ЎзҗҶпјҲж¶ІеҶ·еҸҠйЈҺжүҮпјүгҖҒз”өжұ гҖҒз”өеӯҗжЁЎеқ—зӯүеқҮе®үиЈ…еңЁиәҜе№ІеҶ…пјҢдё”е…·еӨҮеҸҜи°ғж•ҙжҖ§гҖӮtеһӢ
еӣҫиЎЁ10пјҡиәҜе№ІзӨәж„Ҹеӣҫ
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
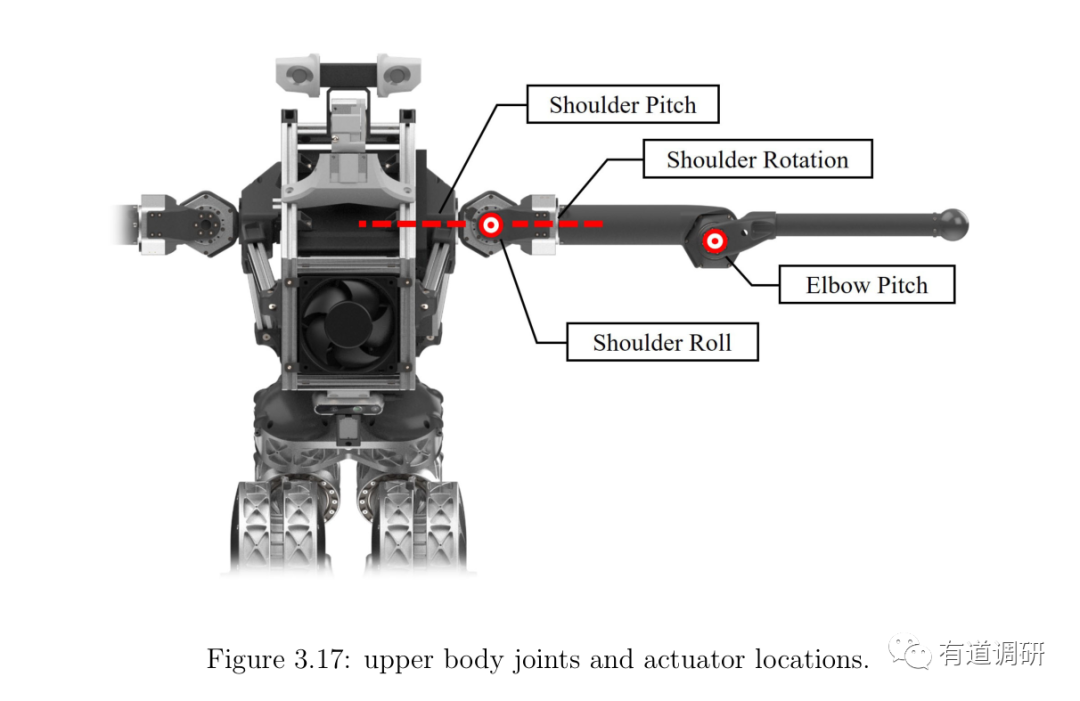
3пјүиҮӮйғЁи®ҫи®ЎпјҡйҮҚиҰҒжҖ§еҗҢж ·дҪҺдәҺдёӢиӮўпјҢе…¶дё»иҰҒдҪңз”ЁжҳҜдёәдәҶе®һзҺ°е№іиЎЎгҖӮи®әж–Үе°ҶжүӢиҮӮе°Ҷи®ҫи®ЎдёәеӣӣдёӘиҮӘз”ұеәҰпјҢд»Ҙе°ҪйҮҸеҮҸе°‘еӣӣиӮўзҡ„йҮҚйҮҸпјҢдёҖдёӘ3иҮӘз”ұеәҰзҡ„иӮ©е…іиҠӮе’ҢдёҖдёӘ1иҮӘз”ұеәҰзҡ„иӮҳе…іиҠӮгҖӮжү§иЎҢеҷЁзҡ„еӨ§е°ҸиҰҒиғҪеӨҹж”Ҝж’‘иә«дҪ“зҡ„йҮҚйҮҸпјҢ并иғҪеӨҹеҝ«йҖҹж‘ҶеҠЁд»Ҙдә§з”ҹжҠөж¶Ҳзҡ„еҠЁйҮҸгҖӮдҪҶжҳҜпјҢжң¬ж–ҮеҜ№дәҺдёҠиӮўе…іиҠӮй—ҙзҡ„дј еҠЁзі»з»ҹжІЎжңүеӨӘеӨҡи®Ёи®әпјҲдҫӢеҰӮдёқжқ гҖҒиҝһжқҶзӯүпјүгҖӮ
дёәдәҶе·©еӣәе’ҢеҮҸе°‘йӣ¶д»¶ж•°йҮҸпјҢжҜҸдёӘиҮӮзҡ„жүҖжңүеӣӣдёӘжү§иЎҢжңәжһ„йғҪжҳҜзӣёеҗҢзұ»еһӢзҡ„гҖӮиӮ©е…іиҠӮеңЁдҝҜд»°-ж»ҡж»ҡ-дҝҜд»°з»“жһ„дёӯжңүдёүдёӘзӣёдәӨзҡ„иҪҙпјҢиҝҷдёҺиӮ©е…іиҠӮзҡ„еұҲдјёгҖҒеӨ–еұ•/еҶ…收е’ҢиӮ©е…іиҠӮзҡ„еҶ…ж—Ӣ/еӨ–ж—Ӣжңүе…ігҖӮдёӨдёӘиҠӮи·қжҺҘеӨҙзҡ„иҫ“еҮәиҪҙеқҮдёәеҚ•ж”Ҝж’‘й…ҚзҪ®пјҢиҖҢиҫҠеӯҗжү§иЎҢжңәжһ„зҡ„иҫ“еҮәиҪҙдёәеҸҢж”Ҝж’‘еӨ№жҢҒй…ҚзҪ®гҖӮејҜеӨҙиҠӮи·қжү§иЎҢжңәжһ„дҪҚдәҺе…іиҠӮеӨ„пјҢжңүиҪ»еҫ®зҡ„еҒҸ移пјҢд»ҘеўһеҠ иӮҳе…іиҠӮзҡ„еұҲжӣІиҝҗеҠЁиҢғеӣҙпјҢдҪҝжң«з«Ҝжү§иЎҢеҷЁеҸҜд»ҘжҺҘи§ҰиӮ©йғЁгҖӮдёәдәҶе°ҪйҮҸеҮҸе°‘и®ҫи®Ўзҡ„йҮҚйҮҸпјҢйҮҮз”ЁзўізәӨз»ҙз®ЎдҪңдёәиҮӮзҡ„з»“жһ„жһ„件гҖӮ
еӣҫиЎЁ10пјҡдёҠиӮўиҮӘз”ұеәҰеҲҶеёғеӣҫ
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
PART4пјҡSystem DesignпјҲеҒҸз®—жі•+з”өеӯҗпјү
ж‘„еғҸеӨҙ+IMU+дј ж„ҹеҷЁжң¬иҙЁдёҠйғҪеұһдәҺжңәеҷЁдәәзҡ„дј ж„ҹйғЁеҲҶгҖӮе№ҝжіӣзҡ„дј ж„ҹеҷЁйҳөеҲ—з”ЁдәҺжөӢйҮҸе’Ңдј°и®ЎжңәеҷЁдәәзҡ„зҠ¶жҖҒпјҢиҒ”зі»дҝЎжҒҜд»ҘеҸҠзӣёеҜ№дәҺдё–з•Ңзҡ„е…ЁзҗғдҪҚзҪ®гҖӮйҷӨдәҶе…іиҠӮз”өжөҒдј ж„ҹеҷЁе’Ңе…іиҠӮи§’еәҰзј–з ҒеҷЁеӨ–пјҢдё»иҰҒдҪҝз”Ёзҡ„дј ж„ҹеҷЁиҝҳжңүз«ӢдҪ“и§Ҷи§үзӣёжңәгҖҒжғҜжҖ§дј ж„ҹеҷЁ
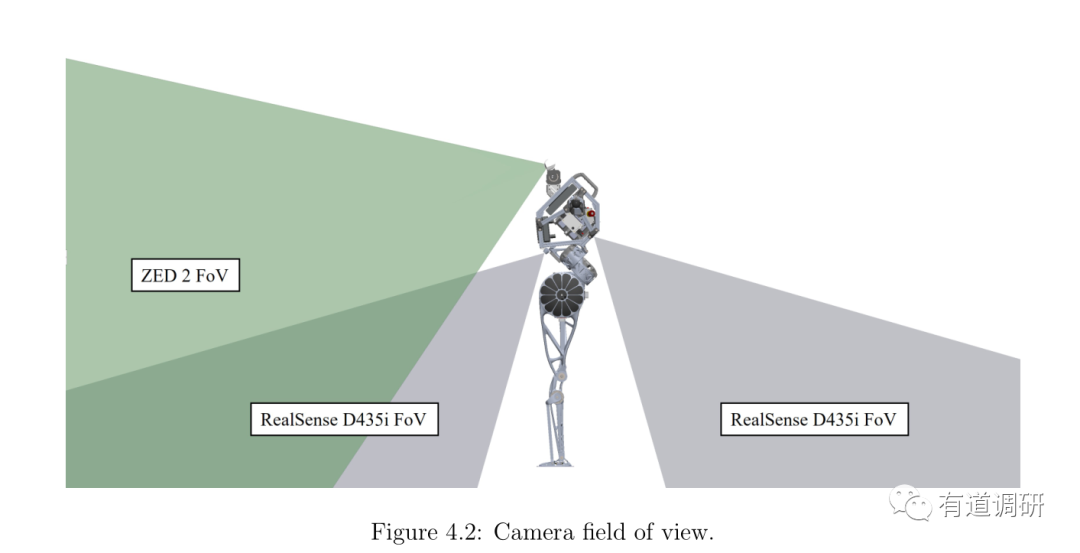
1пјүж‘„еғҸжңәпјҡи®әж–ҮйҖүжӢ©з«ӢдҪ“и§Ҷи§үзӣёжңәиҖҢдёҚжҳҜжҝҖе…үйӣ·иҫҫпјҢеӣ дёәе…¶зӣёеҜ№е®һжғ зҡ„д»·ж је’ҢеңЁе®ӨеҶ…е’Ңе®ӨеӨ–зҺҜеўғдёӢзҡ„зЁіеҒҘжҖ§гҖӮжқҘиҮӘStereolabsзҡ„ZED 2еӣ е…¶е®Ҫи§Ҷеңә(FoV)пјҢйӣҶжҲҗIMUе’Ңе…·жңүж·ұеәҰдј ж„ҹпјҢдҪҚзҪ®и·ҹиёӘе’Ңзӣ®ж ҮжЈҖжөӢзҡ„е®Ңж•ҙSDKиҖҢиў«йҖүдёӯгҖӮ
ZED 2е®үиЈ…еңЁжңәеҷЁдәәзҡ„еӨҙйғЁпјҢе…·жңү平移е’ҢеҖҫж–ңзҡ„2иҮӘз”ұеәҰйўҲйғЁе…іиҠӮпјҢз”ЁдәҺе®ҡдҪҚзӣёжңәгҖӮйҷӨдәҶZED 2ж‘„еғҸеӨҙпјҢдёӨдёӘиӢұзү№е°”RealSense D435iеҲҶеҲ«е®үиЈ…еңЁжңәеҷЁдәәзҡ„еүҚеҗҺпјҢжҸҗдҫӣжңәеҷЁдәәйҷ„иҝ‘зҡ„й«ҳдҝқзңҹең°йқўдҝЎжҒҜпјҲеҪўжҲҗж•ҲжһңеҰӮеӣҫиЎЁ11жүҖзӨәпјүгҖӮ
еӣҫиЎЁ11пјҡжңәеҷЁдәәи§ҶйҮҺ
иө„ж–ҷжқҘжәҗпјҡUCLAи®әж–Ү
2пјүIMUпјҲжғҜжҖ§еҜјиҲӘпјүпјҡIMUжҳҜиғҪеӨҹе№іиЎЎе’ҢзЁіе®ҡиЎҢиө°зҡ„е…ій”®дј ж„ҹеҷЁгҖӮе…ёеһӢзҡ„IMUдј ж„ҹеҷЁеҢ…жӢ¬дёүиҪҙеҠ йҖҹеәҰи®Ўе’ҢдёүиҪҙйҷҖиһәд»ӘгҖӮеҸҜйҖүзҡ„пјҢдёүиҪҙзЈҒејәи®Ўд№ҹеҢ…жӢ¬зңҹеҢ—еҸӮиҖғпјҢйҖҡеёёз§°дёәе§ҝжҖҒе’ҢиҲӘеҗ‘еҸӮиҖғзі»з»ҹ(AHRS)гҖӮжңҖеҲқйҖүжӢ©Parker LORD MicrostrainеҹәдәҺеҫ®жңәз”өзі»з»ҹ(MEMS)зҡ„IMU 3DM-GX5жҳҜеӣ дёәе…¶е°әеҜёе’Ңд»·ж јгҖӮ
дёҺеҹәдәҺе…үзәӨйҷҖиһәд»Ә(FOG)зҡ„IMUзӣёжҜ”пјҢMEMSдј ж„ҹеҷЁдҪ“з§Ҝжӣҙе°ҸпјҢжҲҗжң¬жӣҙдҪҺпјҢдҪҶйҖҡеёёе…·жңүжӣҙе·®зҡ„еҷӘеЈ°е’ҢеҒҸзҪ®зЁіе®ҡжҖ§гҖӮйҡҸзқҖеҹәдәҺMEMSзҡ„IMUзҡ„еҝ«йҖҹеҸ‘еұ•пјҢжҲ‘们еҲҮжҚўеҲ°MicroStrain 3DM-CV7жҲҳжңҜзә§IMUпјҢе…¶жҖ§иғҪжӯЈеңЁжҺҘиҝ‘Microstrainзі»еҲ—IMUеҶ…зҪ®жү©еұ•еҚЎе°”жӣјж»ӨжіўеҷЁ(EKF)пјҢз”ЁдәҺиһҚеҗҲеҠ йҖҹеәҰе’Ңи§’йҖҹзҺҮж•°жҚ®пјҢдә§з”ҹе§ҝжҖҒе’ҢиҲӘеҗ‘ж•°жҚ®гҖӮ
еңЁе®һи·өдёӯ, з”ұдәҺеӨ§йҮҸзҡ„иҪҜзЎ¬й“Ғе№Іжү°пјҢеҹәдәҺзЈҒеҠӣи®Ўзҡ„иҲӘеҗ‘еҸӮиҖғиў«еҝҪз•ҘгҖӮиҲӘеҗ‘ж•°жҚ®дёҖзӣҙжҳҜзәҜзІ№зҡ„йҷҖиһәдёәеҹәзЎҖзҡ„пјҢе°Ҷдҫқиө–дәҺеӨ–йғЁдј ж„ҹеҷЁпјҢеҰӮзӣёжңәжҲ–е…ЁзҗғеҜјиҲӘеҚ«жҳҹзі»з»ҹ(GNSS)зҡ„иҲӘеҗ‘иЎҘеҒҝгҖӮ
IMUзӣ®еүҚе°ҡжІЎжңүжңәеҷЁдәәзҡ„еҸӮиҖғд»·еҖјйҮҸпјҢдҪҶIMUйҖҗжӯҘз”ЁдәҺе…ЁзҗғйғЁеҲҶдёӯй«ҳз«ҜиҪҰиҫҶпјҢе…¶еҚ•иҪҰд»·еҖјйҮҸе№іеқҮжқҘзңӢ1800е…ғе·ҰеҸіпјҢеӣҪеҶ…еҺӮе•ҶдёәеҚҺдҫқ科жҠҖгҖҒеҜјиҝңзӯүгҖӮ
3пјүи¶ійғЁдј ж„ҹеҷЁпјҡеҹәдәҺ6иҪҙеҠӣзҹ©дј ж„ҹеҷЁзҡ„еҚҮзә§гҖӮеҜ№дәҺдј з»ҹзҡ„д»ҝдәәзі»з»ҹпјҢ6иҪҙеҠӣжүӯзҹ©(F/T)дј ж„ҹеҷЁз”ЁдәҺең°йқўеҸҚдҪңз”ЁеҠӣе’ҢжҺҘи§ҰзҠ¶жҖҒеҸҚйҰҲгҖӮ然иҖҢпјҢе®ғ们еҫҖеҫҖжҳҜи„Ҷејұзҡ„пјҢдёҚиғҪеӨ„зҗҶеӨ§зҡ„еҶІеҮ»жҲ–иҝҮиҪҪгҖӮеӣ жӯӨпјҢй’ҲеҜ№зү№е®ҡзҡ„д»»еҠЎи®ҫи®ЎдәҶе®ҡеҲ¶зҡ„и¶ійғЁдј ж„ҹеҷЁгҖӮзӣ®ж ҮжҳҜи®ҫи®ЎдёҖдёӘеқҡеӣәзҡ„и¶ійғЁдј ж„ҹеҷЁпјҢеҸҜд»ҘеҸҜйқ ең°жЈҖжөӢең°йқўжҺҘи§ҰгҖӮиҖҢдёҚжҳҜе®Ңж•ҙзҡ„6иҪҙеҠӣе’Ңжүӯзҹ©дј ж„ҹпјҢе®ҡеҲ¶зҡ„и„ҡдј ж„ҹеҷЁеҸӘиғҪжөӢйҮҸдёӨдёӘеһӮзӣҙзҡ„ең°йқўеҸҚдҪңз”ЁеҠӣпјҢдҪҚдәҺи„ҡеҗҺи·ҹе’Ңи„ҡи¶ҫгҖӮ
6иҪҙIMUдҪңдёәдёҖдёӘйўқеӨ–зҡ„дј ж„ҹеҷЁд№ҹйӣҶжҲҗеңЁи„ҡдј ж„ҹеҷЁPCBдёҠгҖӮйҷҖиһәд»Әе’ҢеҠ йҖҹеәҰи®Ўзҡ„ж•°жҚ®еҸҜд»Ҙз”ЁжқҘиҝӣдёҖжӯҘжҸҗй«ҳзҠ¶жҖҒдј°и®ЎеҷЁзҡ„жҖ§иғҪпјҢжҲ–иҖ…дёәжңӘжқҘзҡ„з ”з©¶жҸҗдҫӣеё®еҠ©гҖӮ
3. иҝ‘жңҹдә§дёҡжҳҫзӨәзҡ„йҮҚиҰҒиҫ№йҷ…жңүе“Әдәӣпјҹ
3.1. иЎҢжҳҹж»ҡжҹұдёқжқ еҠ е·ҘйҡҫеәҰеӨ§пјҢи…ҝйғЁдёҚжҺ’йҷӨйғЁеҲҶе°қиҜ•и®әж–ҮдёӯжҸҗеҲ°зҡ„ж–№ејҸпјҢеҰӮдёҠж–ҮжүҖиҝ°еўһйҮҸдёәиҝһжқҶ+иЎҢжҳҹеҮҸйҖҹжңәгҖӮ
иЎҢжҳҹж»ҡжҹұдёқжқ зӣ®еүҚжҳҜиў«еә”з”ЁдәҺзү№ж–ҜжӢүдёӢиӮўпјҲеӨ§и…ҝгҖҒе°Ҹи…ҝпјүзҡ„дј з»ҹз»“жһ„пјҢе…¶дјҳеҠҝеңЁдәҺеҠҹиғҪйқһеёёејәеӨ§пјҲиҜҰжғ…и§Ғжң¬ж–ҮеӣҫиЎЁ2пјүпјҢдҪҶе…¶еҠЈеҠҝд№ҹжҳҜжҳҫиҖҢжҳ“и§Ғзҡ„пјҢеҚіеҠ е·ҘйҡҫеәҰеӨ§пјҲжҳҫи‘—еӨ§дәҺж»ҡзҸ дёқжқ пјүпјҢеҜ№дәҺжңәеәҠгҖҒзЈЁеәҠзӯүиҰҒжұӮжһҒй«ҳпјҢйҮҮиҙӯи®ҫеӨҮе°ҡе…·еӨҮдёҖе®ҡйҡҫеәҰгҖӮеӣ иҖҢпјҢе…¶д»–дј еҠЁж–№ејҸд№ҹжңүжңӣејҖе§Ӣиҝӣе…ҘдәәеҪўжңәеҷЁдәәз ”з©¶и§ҶйҮҺгҖӮ
еӣҫиЎЁ12пјҡиЎҢжҳҹж»ҡжҹұдёқжқ зӨәж„Ҹеӣҫ
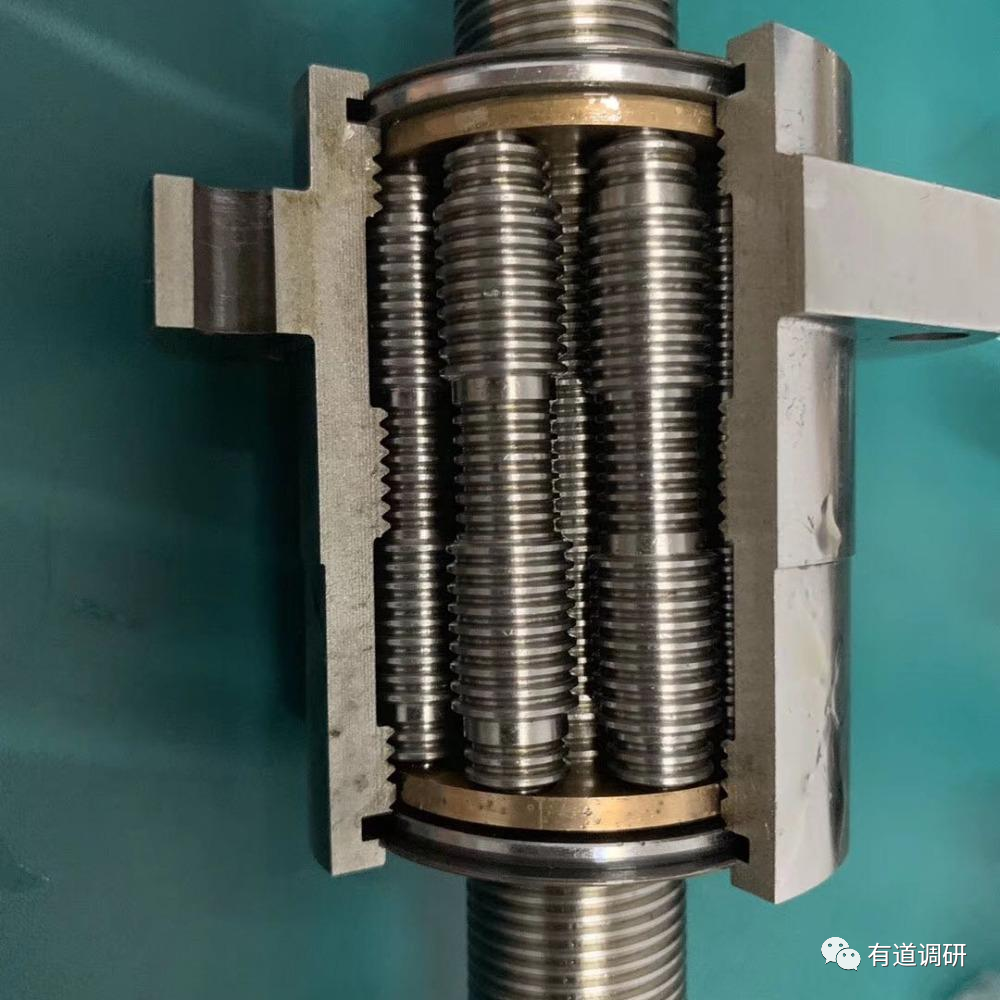
еӣҫиЎЁ13пјҡиЎҢжҳҹж»ҡжҹұдёқжқ зӨәж„Ҹеӣҫ

иө„ж–ҷжқҘжәҗпјҡеҗ„жңәеҷЁдәәз»“жһ„и§ЈиҜ»
3.2. дј ж„ҹеҷЁж„Ҹд№үжҸҗеҚҮгҖҒеӣҪдә§еҢ–иҝ«еҲҮжҖ§дҪңз”ЁеӨ§гҖӮ
еҠӣжҺ§пјҡеӨҡз»ҙеҠӣзҹ©/еҠӣдј ж„ҹжҳҜзӣ®еүҚжңҖдјҳи§ЈпјҢз”өеӯҗзҡ®иӮӨжҲ–дёәи§Ұи§үз»ҲжһҒж–№жЎҲгҖӮзӣ®еүҚжңәеҷЁдәәеҠӣжҺ§ж–№жЎҲеӨ§иҮҙжңү3зұ»пјҢеҲҶеҲ«дёәз”өжөҒзҺҜеҠӣжҺ§гҖҒеӨҡз»ҙеҠӣзҹ©/еҠӣдј ж„ҹеҷЁеҠӣжҺ§гҖҒиў«еҠЁеҠӣжҺ§пјҲеј№жҖ§дҪ“пјүпјҢе…¶дёӯеӨҡз»ҙеҠӣзҹ©/еҠӣдј ж„ҹеҷЁеҠӣжҺ§жҳҜеҪ“еүҚеҠӣжҺ§зҡ„жңҖдҪіж–№жЎҲпјҢ其硬件еҢ…жӢ¬е…іиҠӮйғЁдҪҚзҡ„еҚ•иҪҙеҠӣзҹ©дј ж„ҹеҷЁе’ҢжңәеҷЁдәәжү§иЎҢеҷЁжң«з«Ҝзҡ„6иҪҙеҠӣдј ж„ҹеҷЁгҖӮ
еҗҢж—¶пјҢжңәеҷЁдәәиӢҘиҰҒжЁЎжӢҹдәәдҪ“зҡ„и§Ұи§үпјҢд»ҘеҸҠе®һзҺ°дәәдҪ“зҡ®иӮӨеҜ№жё©еәҰгҖҒж№ҝеәҰзӯүеӨ–з•Ңзү©зҗҶйҮҸзҡ„ж„ҹзҹҘпјҢеҲҷз”өеӯҗзҡ®иӮӨеҸҜиғҪжҳҜжңҖдҪіи·Ҝеҫ„д№ӢдёҖгҖӮз”өеӯҗзҡ®иӮӨйңҖиҰҒйӣҶжҲҗеҗ„зұ»дј ж„ҹеҷЁе’ҢйӣҶжҲҗз”өи·ҜпјҢ并дҪҝз”Ёжҹ”жҖ§зҡ„жқҗж–ҷеҲ¶дҪңпјҢеЈҒеһ’иҫғй«ҳпјҢзӣ®еүҚе°ҡжңӘеңЁжңәеҷЁдәәйўҶеҹҹеӨ§йҮҸеә”з”ЁгҖӮдҪҶд»Һжіӣз”ЁжҖ§дёҺд»ҝз”ҹжҖ§и§’еәҰпјҢз”өеӯҗзҡ®иӮӨжҲ–жҳҜжңәеҷЁдәәи§Ұи§үзҡ„з»ҲжһҒж–№жЎҲгҖӮ

иҜҒеҲёејҖжҲ·В | ж·»еҠ еҫ®дҝЎпјҡschelling6666
е®ҳж–№дәӨжөҒзӨҫзҫӨВ | ж·»еҠ еҫ®дҝЎпјҡschelling6666
жёҜзҫҺиӮЎВ | ж·»еҠ еҫ®дҝЎпјҡschelling6666