


阅读提示:本文约 4000 字,建议收藏后阅读!
为解决隔离开关机构箱安装时经常出现的安装质量低、难度大,尤其是操动机构输出轴与传动连杆不同轴的问题,贵州电网有限责任公司贵阳供电局的卢兴福、龙波、杨艳、樊三军,在2023年第6期《电气技术》上撰文,研制出一种隔离开关机构箱安装装置,用新装置代替传统机具吊装和纯人工安装的方法,以提高安装质量,降低劳动强度,减少停电时间。






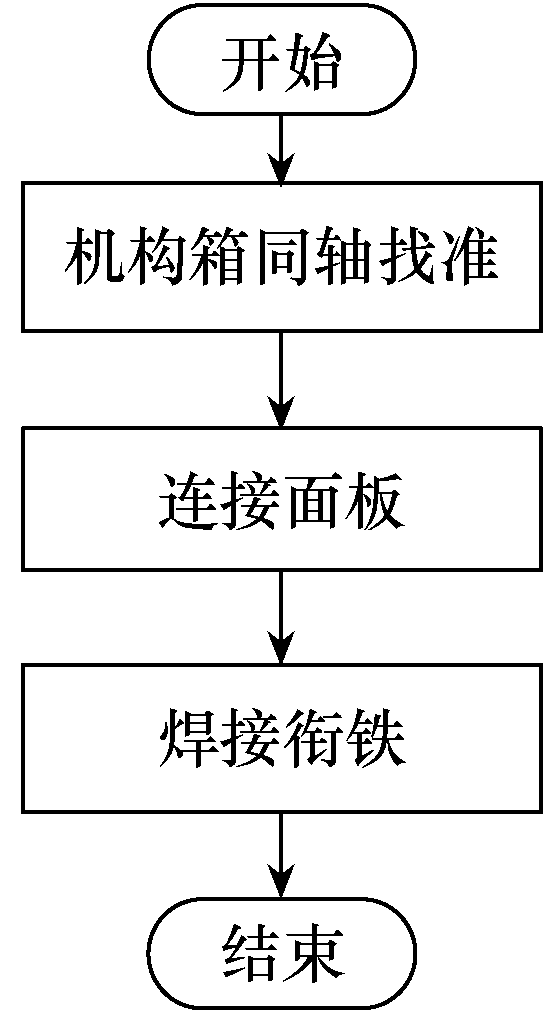



1)减少安装时间,仅需38min左右便可完成安装。 2)减少安装人员,由原来需要安装人员5人降到仅需2人。 3)简化安装流程,可以实现一次性安装成功,不会出现面板及衔铁焊接位置不正确而反复返工的现象,降低了安装难度。 4)提高安装质量,机构箱输出轴与垂直连杆同轴度误差≤1%,表明能做到精准安装。