



еҠӣеӯҰдёҺжҲ‘们зҡ„з”ҹжҙ»жҒҜжҒҜзӣёе…іпјҢеӨ§еҲ°иҲӘз©әиҲӘеӨ©гҖҒе°ҸеҲ°йҡҸеӨ„еҸҜи§Ғзҡ„е·Ҙе…·пјҲдҫӢеҰӮжүіжүӢпјүе…¶дёӯйғҪжңүжҲ–еӨҡжҲ–е°‘зҡ„еҠӣеӯҰзҹҘиҜҶгҖӮ
иҖҢдҪңдёәй«ҳзӯүж•ҷиӮІе…¶дёӯдёҖзҺҜзҡ„еӨ§еӯҰиҜҫзЁӢжӣҙжҳҜеҰӮжӯӨпјҢйӮЈд№Ҳи®©жҲ‘们зңӢзңӢжөӢжҺ§жҠҖжңҜдёҺд»ӘеҷЁдё“дёҡиҜҫзЁӢдёӯйғҪжңүд»Җд№ҲеҠӣеӯҰзҹҘиҜҶеҗ§пјҒ
жөӢжҺ§жҠҖжңҜдёҺд»ӘеҷЁ
жөӢжҺ§жҠҖжңҜдёҺд»ӘеҷЁдё“дёҡд»ҘдҝЎжҒҜиҺ·еҸ–дёҺдҝЎжҒҜеә”з”ЁдёәдёӯеҝғпјҢд»Ҙж•°зҗҶзҹҘиҜҶдёәеҹәзЎҖпјҢеҹ№е…»еӯҰз”ҹжҺҢжҸЎдҝЎжҒҜиҺ·еҸ–зҗҶи®әдёҺж–№жі•гҖҒзІҫеҜҶжңәжў°дёҺд»ӘеҷЁи®ҫи®ЎгҖҒжөӢиҜ•дҝЎеҸ·еӨ„зҗҶжҠҖжңҜгҖҒжҷәиғҪжҺ§еҲ¶зҗҶи®әдёҺж–№жі•зӯүзӣёе…іеҹәзЎҖзҹҘиҜҶпјҢжҺҢжҸЎдҝЎжҒҜиҺ·еҸ–гҖҒдј иҫ“гҖҒеӨ„зҗҶе’Ңеә”з”Ёзҡ„еҹәжң¬жҠҖжңҜдёҺж–№жі•пјҢе…·жңүз ”з©¶гҖҒи®ҫи®ЎгҖҒејҖеҸ‘е’Ңеә”з”ЁжөӢжҺ§зі»з»ҹзҡ„еҹәжң¬жҠҖиғҪгҖӮ

иғҪйҮҸеҸҳжҚў
еңЁе®һйҷ…еә”з”ЁдёӯпјҢеӯҳеңЁе…ӯз§Қеҹәжң¬зҡ„иғҪйҮҸзұ»еһӢпјҢеҚіжңәжў°гҖҒзғӯгҖҒзЈҒгҖҒз”өгҖҒеҢ–еӯҰе’Ңиҫҗе°„гҖӮе…¶дёӯжңәжў°иғҪйҮҸзҡ„дҝЎеҸ·еҪўејҸеҢ…жӢ¬дҪҚзҪ®гҖҒйҖҹеәҰгҖҒеҠ йҖҹеәҰгҖҒеә”еҠӣгҖҒеҠӣзҹ©гҖҒеҠЁйҮҸзӯүгҖӮд»Җд№ҲжҳҜеә”еҠӣе’ҢеҠӣзҹ©е‘ўпјҹ
еә”еҠӣпјҡзү©дҪ“з”ұдәҺеӨ–еӣ пјҲеҸ—еҠӣгҖҒж№ҝеәҰгҖҒжё©еәҰеңәеҸҳеҢ–зӯүпјүиҖҢеҸҳеҪўж—¶пјҢеңЁзү©дҪ“еҶ…еҗ„йғЁеҲҶд№Ӣй—ҙдә§з”ҹзӣёдә’дҪңз”Ёзҡ„еҶ…еҠӣпјҢеҚ•дҪҚйқўз§ҜдёҠзҡ„еҶ…еҠӣз§°дёәеә”еҠӣгҖӮеҗҢжҲӘйқўеһӮзӣҙзҡ„з§°дёәжӯЈеә”еҠӣжҲ–жі•еҗ‘еә”еҠӣпјҢеҗҢжҲӘйқўзӣёеҲҮзҡ„з§°дёәеүӘеә”еҠӣжҲ–еҲҮеә”еҠӣгҖӮ
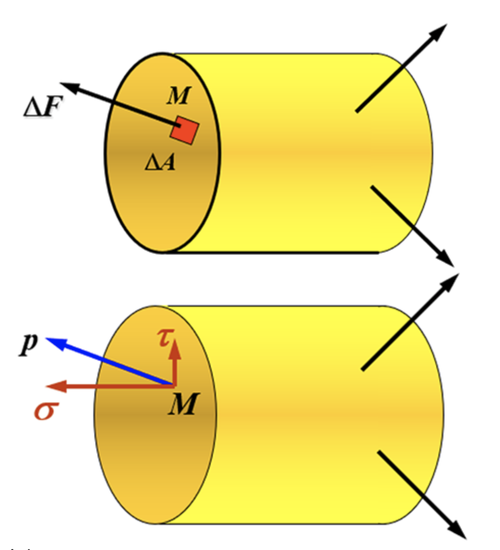
еҠӣзҹ©пјҡеҠӣзҹ©иЎЁзӨәеҠӣеҜ№зү©дҪ“дҪңз”Ёж—¶жүҖдә§з”ҹзҡ„иҪ¬еҠЁж•Ҳеә”зҡ„зү©зҗҶйҮҸгҖӮеҠӣе’ҢеҠӣиҮӮзҡ„д№ҳз§ҜеҸ«еҒҡеҠӣеҜ№иҪ¬еҠЁиҪҙзҡ„еҠӣзҹ©гҖӮ

еә”еҸҳж•Ҳеә”
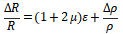
йҮ‘еұһеҜјдҪ“жҲ–еҚҠеҜјдҪ“жқҗж–ҷеҲ¶жҲҗзҡ„з”өйҳ»дҪ“пјҢеҪ“收еҲ°еӨ–еҠӣдҪңз”Ёж—¶пјҢе®ғзҡ„з”өйҳ»еҖјдјҡеҸ‘йҖҒеҸҳеҢ–пјҢе…¶зӣёеҜ№еҸҳеҢ–йҮҸдёәпјҡ
еә”еҸҳпјҡзү©дҪ“еңЁеҸ—еҲ°еӨ–еҠӣдҪңз”ЁдёӢдјҡдә§з”ҹдёҖе®ҡзҡ„еҸҳеҪўпјҢеҸҳеҪўзҡ„зЁӢеәҰз§°еә”еҸҳгҖӮеә”еҸҳжңүжӯЈеә”еҸҳпјҲзәҝеә”еҸҳпјүпјҢеҲҮеә”еҸҳпјҲи§’еә”еҸҳпјүеҸҠдҪ“еә”еҸҳгҖӮ
жіҠжқҫжҜ”пјҡжҢҮжқҗж–ҷеңЁеҚ•еҗ‘еҸ—жӢүжҲ–еҸ—еҺӢж—¶пјҢжЁӘеҗ‘жӯЈеә”еҸҳдёҺиҪҙеҗ‘жӯЈеә”еҸҳзҡ„жҜ”еҖјпјҢе®ғжҳҜеҸҚжҳ жқҗж–ҷжЁӘеҗ‘еҸҳеҪўзҡ„еј№жҖ§еёёж•°гҖӮ
еә”еҸҳејҸдј ж„ҹеҷЁ
еә”еҸҳејҸдј ж„ҹеҷЁзҡ„еҹәжң¬е·ҘдҪңеҺҹзҗҶпјҡеҪ“иў«жөӢзү©зҗҶйҮҸдҪңз”ЁеңЁеј№жҖ§е…ғ件дёҠпјҢеј№жҖ§е…ғ件еңЁеҠӣгҖҒеҠӣзҹ©жҲ–еҺӢеҠӣзӯүзҡ„дҪңз”ЁдёӢеҸ‘з”ҹеҸҳеҪўпјҢеҸҳжҚўжҲҗзӣёеә”зҡ„еә”еҸҳжҲ–дҪҚ移пјҢ然еҗҺдј йҖ’з»ҷдёҺд№Ӣзӣёиҝһзҡ„еә”еҸҳзүҮпјҢе°Ҷеј•иө·еә”еҸҳж•Ҹж„ҹе…ғ件зҡ„з”өйҳ»еҖјеҸ‘з”ҹеҸҳеҢ–пјҢйҖҡиҝҮиҪ¬жҚўз”өи·ҜеҸҳжҲҗз”өйҮҸиҫ“еҮәгҖӮиҫ“еҮәзҡ„з”өйҮҸеӨ§е°ҸеҸҚжҳ дәҶиў«жөӢзү©зҗҶйҮҸзҡ„еӨ§е°ҸгҖӮ
еә”еҸҳзүҮпјҡз”ұж•Ҹж„ҹж …зӯүжһ„жҲҗз”ЁдәҺжөӢйҮҸеә”еҸҳзҡ„е…ғ件гҖӮ
з”өйҳ»еә”еҸҳзүҮзҡ„е·ҘдҪңеҺҹзҗҶпјҡеҹәдәҺеә”еҸҳж•Ҳеә”еҲ¶дҪңпјҢеҚіеҜјдҪ“жҲ–еҚҠеҜјдҪ“жқҗж–ҷеңЁеӨ–з•ҢеҠӣзҡ„дҪңз”ЁдёӢдә§з”ҹжңәжў°еҸҳеҪўж—¶пјҢе…¶з”өйҳ»еҖјзӣёеә”зҡ„еҸ‘з”ҹеҸҳеҢ–пјҢиҝҷз§ҚзҺ°иұЎз§°дёәвҖңеә”еҸҳж•Ҳеә”вҖқгҖӮ
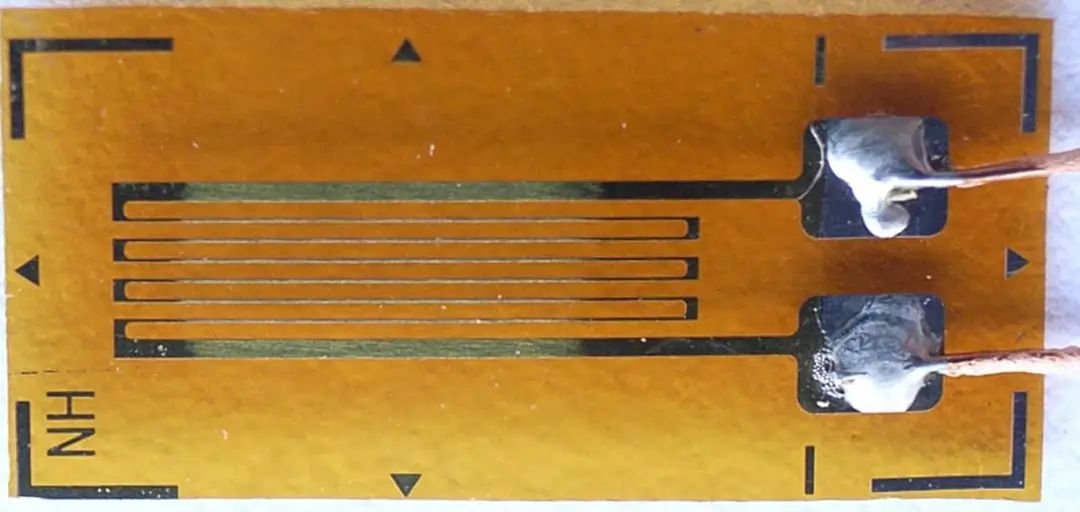
з”өйҳ»еә”еҸҳзүҮ
еә”еҸҳејҸдј ж„ҹеҷЁзҡ„еә”з”Ё
еә”еҸҳејҸеҠӣдј ж„ҹеҷЁпјҡиў«жөӢзү©зҗҶйҮҸдёәиҪҪиҚ·жҲ–еҠӣзҡ„еә”еҸҳејҸдј ж„ҹеҷЁгҖӮ
еә”еҸҳејҸеҺӢеҠӣдј ж„ҹеҷЁпјҡдё»иҰҒз”ЁдәҺжөӢйҮҸжөҒеҠЁд»ӢиҙЁзҡ„еҠЁжҖҒжҲ–иҖ…йқҷжҖҒеҺӢеҠӣгҖӮ
еә”еҸҳејҸеҠ йҖҹеәҰдј ж„ҹеҷЁпјҡз”ЁдәҺжөӢйҮҸзү©дҪ“зҡ„еҠ йҖҹеәҰгҖӮ
зІҫеҜҶжңәжў°и®ҫи®Ўзҡ„ејәеәҰй—®йўҳ
ејәеәҰпјҡејәеәҰжҳҜйӣ¶д»¶жҠөеҫЎеӨ–иҪҪиҚ·дҪңз”Ёзҡ„иғҪеҠӣгҖӮеңЁзІҫеҜҶжңәжў°и®ҫи®Ўдёӯ,иҖғиҷ‘зІҫеәҰиҰҒжұӮж—¶еҝ…йЎ»йҰ–е…ҲдҝқиҜҒејәеәҰгҖӮд»»дҪ•дёҖдёӘжңәжў°зұ»зҡ„йӣ¶д»¶е’ҢйғЁд»¶,еңЁе·ҘдҪңж—¶йҰ–е…Ҳеҝ…йЎ»дҝқиҜҒжңүи¶іеӨҹзҡ„ејәеәҰгҖӮејәеәҰдёҚи¶іж—¶,йӣ¶д»¶е°ҶеҸ‘з”ҹж–ӯиЈӮйҖ жҲҗж•ҙдҪ“з ҙеқҸ,жҲ–дә§з”ҹеЎ‘жҖ§еҸҳеҪў,дҪҝж•ҙдёӘйӣ¶д»¶дё§еӨұе·ҘдҪңиғҪеҠӣиҖҢеӨұж•ҲгҖӮйӣ¶д»¶дә§з”ҹз ҙеқҸзҡ„еҺҹеӣ дё»иҰҒжҳҜз”ұдәҺдҪңз”ЁеңЁйӣ¶д»¶дёҠзҡ„жӢүдјёгҖҒеҺӢзј©гҖҒејҜжӣІгҖҒжүӯиҪ¬гҖҒеүӘеҲҮжҲ–еӨҚеҗҲеә”еҠӣиҝҮеӨ§иҖҢеј•иө·зҡ„гҖӮејәеәҰеҸҲеҸҜд»ҘеҲҶдёәж•ҙдҪ“ејәеәҰе’ҢиЎЁйқўејәеәҰгҖӮ
еҲҡеәҰпјҡеҲҡеәҰжҳҜеҸҚжҳ йӣ¶д»¶еңЁиҪҪиҚ·дҪңз”ЁдёӢжҠөжҠ—еј№жҖ§еҸҳеҪўзҡ„иғҪеҠӣ,е…¶еӨ§е°Ҹз”Ёдә§з”ҹеҚ•дҪҚеҸҳеҪўжүҖйңҖиҰҒзҡ„еӨ–еҠӣжҲ–еӨ–еҠӣзҹ©жқҘиЎЁзӨәгҖӮ
еҸҳеҪўзҡ„еҹәжң¬еҪўејҸ
жӢүдјёдёҺеҺӢзј©гҖҒејҜжӣІгҖҒжүӯиҪ¬гҖҒеүӘеҲҮгҖӮ
и®ёз”Ёеә”еҠӣ
жңәжў°и®ҫи®ЎжҲ–е·ҘзЁӢз»“жһ„и®ҫи®Ўдёӯе…Ғи®ёйӣ¶д»¶жҲ–жһ„件жүҝеҸ—зҡ„жңҖеӨ§еә”еҠӣеҖјгҖӮиҰҒеҲӨе®ҡйӣ¶д»¶жҲ–жһ„件еҸ—иҪҪеҗҺзҡ„е·ҘдҪңеә”еҠӣиҝҮй«ҳжҲ–иҝҮдҪҺпјҢйңҖиҰҒйў„е…ҲзЎ®е®ҡдёҖдёӘиЎЎйҮҸзҡ„ж ҮеҮҶпјҢиҝҷдёӘж ҮеҮҶе°ұжҳҜи®ёз”Ёеә”еҠӣгҖӮеҮЎжҳҜйӣ¶д»¶жҲ–жһ„件дёӯзҡ„е·ҘдҪңеә”еҠӣдёҚи¶…иҝҮи®ёз”Ёеә”еҠӣж—¶пјҢиҝҷдёӘйӣ¶д»¶жҲ–жһ„件еңЁиҝҗиҪ¬дёӯжҳҜе®үе…Ёзҡ„пјҢеҗҰеҲҷе°ұжҳҜдёҚе®үе…Ёзҡ„гҖӮ
зІҫеҜҶжңәжў°з»“жһ„и®ҫи®Ўзҡ„еҹәжң¬еҺҹеҲҷ
иҝҗеҠЁеӯҰ-еҚҠиҝҗеҠЁеӯҰеҺҹзҗҶпјҡж №жҚ®еҲҡдҪ“иҝҗеҠЁеӯҰе…ӯзӮ№е®ҡдҪҚеҺҹзҗҶ,д»»дҪ•дёҖдёӘжңәжў°зұ»зҡ„йӣ¶д»¶,еңЁдёүз»ҙз©әй—ҙе…ұжңү6дёӘиҮӘз”ұеәҰ,еҚіжІҝx,y,z 3дёӘеқҗж Үж–№еҗ‘зҡ„移еҠЁе’Ңз»•x,y,z 3дёӘеқҗж ҮиҪҙзҡ„иҪ¬еҠЁгҖӮиӢҘиҰҒеҺ»йҷӨиҮӘз”ұеәҰ,еә”ж–ҪеҠ зәҰжқҹ,зәҰжқҹеә”жҳҜзӮ№жҺҘи§ҰгҖӮ1 дёӘзәҰжқҹж¶ҲйҷӨ1дёӘиҮӘз”ұеәҰгҖӮзәҰжқҹзӮ№зҡ„е®үжҺ’еә”жҢүдёүзӮ№еҶіе®ҡдёҖе№ійқўгҖҒдәҢзӮ№еҶіе®ҡдёҖзӣҙзәҝзҡ„еҺҹеҲҷ,дёҚе…Ғи®ёдә§з”ҹиҝҮе®ҡдҪҚ,еҚійқҷдёҚе®ҡгҖӮ
жңҖе°ҸеҸҳеҪўеҺҹзҗҶпјҡйӣ¶йғЁд»¶еңЁе·ҘдҪңж—¶пјҢеҰӮжһңдә§з”ҹеҸҳеҪў,еҲҷеҝ…е°Ҷеј•иө·д»ӘеҷЁиҜҜе·®гҖӮдёәжӯӨеңЁи®ҫи®Ўж—¶,еә”еҠӣжұӮдҪҝз”ұдәҺйҮҚйҮҸгҖҒеӨ–еҠӣгҖҒзғӯиҶЁиғҖгҖҒеҶ…еә”еҠӣзӯүзҡ„еҪұе“ҚжүҖеј•иө·зҡ„еҸҳеҪўдёәжңҖе°ҸпјҢиҝҷе°ұжҳҜеҸҳеҪўжңҖе°ҸеҺҹеҲҷгҖӮ
иҖғиҷ‘ејәеәҰж—¶еә”жіЁж„Ҹзҡ„еҺҹеҲҷ
зӯүејәеәҰеҺҹзҗҶпјҡеңЁи®ҫи®Ўйӣ¶йғЁд»¶ж—¶,еә”е°ҪйҮҸдҪҝеҗҢдёҖйӣ¶йғЁд»¶дёҠеҗ„еӨ„зҡ„ејәеәҰжҺҘиҝ‘зӣёзӯү,д»ҘдҪҝеҗ„еӨ„йғҪиғҪе……еҲҶеҲ©з”Ёе…¶ејәеәҰ,дҝқиҜҒжңҖжңүж•Ҳең°еҲ©з”Ёжқҗж–ҷпјҢеҮҸе°Ҹйӣ¶йғЁд»¶зҡ„дҪ“з§Ҝе’ҢеҮҸиҪ»йҮҚйҮҸ,дҪҝеҗ„еӨ„зҡ„еҜҝе‘ҪзӣёзӯүгҖӮ
еҠӣзҡ„дј йҖ’и·Ҝеҫ„жңҖзҹӯеҺҹзҗҶпјҡжҳҜжҢҮи®ҫи®Ўж—¶еә”дҪҝеҠӣжҲ–еҠӣзҹ©,д»Һе…¶дә§з”ҹеӨ„дёҖзӣҙеҲ°еҹәеә§дёәжӯў,е…¶й—ҙжүҖз»ҸиҝҮзҡ„и·Ҝеҫ„еә”ж„Ҳзҹӯж„ҲеҘҪгҖӮеӣ дёәеҠӣжөҒжүҖз»ҸиҝҮзҡ„еҢәеҹҹ,еқҮдјҡдә§з”ҹеә”еҠӣе’ҢеҸҳеҪўгҖӮиӢҘиғҪдҪҝдј йҖ’и·Ҝеҫ„жңҖзҹӯ,еҲҷеҸҜеҮҸе°‘жқҗж–ҷпјҢеҮҸе°ҸдҪ“з§Ҝе’ҢеҮҸиҪ»йҮҚйҮҸ,并еҸҜжҸҗй«ҳж•ҙжңәзҡ„зІҫеәҰе’Ңе·ҘдҪңжҖ§иғҪгҖӮ
еҠӣиҮӘе№іиЎЎеҺҹзҗҶпјҡжҳҜжҢҮи®ҫи®Ўеә”е°ҪеҸҜиғҪжҠҠе·ҘдҪңдёӯдә§з”ҹдёҚеҲ©зҡ„еҠӣжҲ–еҠӣзҹ©,еңЁе…¶дә§з”ҹеӨ„дәҲд»ҘеҠӣе№іиЎЎ,дҪҝе…¶дёҚиҮҙдј йҖ’еҲ°е…¶д»–ең°ж–№,д»Ҙе…ҚеҪұе“Қж•ҙжңәе·ҘдҪңгҖӮдҫӢеҰӮ,еңЁиҪҙдёҠз”ұдәҺдёҚе№іиЎЎйҮҚйҮҸиҖҢеј•иө·зҡ„зҰ»еҝғеҠӣ,йҖҡеёёйҮҮз”Ёй…ҚйҮҚзҡ„еҠһжі•дәҲд»ҘеҠӣе№іиЎЎгҖӮ
еҠӣиҮӘеҠ ејәеҺҹеҲҷпјҡдҫӢеҰӮеңЁи®ҫи®ЎеҜҶе°ҒиЈ…зҪ®ж—¶пјҢеҜҶе°ҒеңҲзҡ„е®үж”ҫеә”дҝқиҜҒеңЁдёӨиҫ№д»ӢиҙЁзҡ„еҺӢеҠӣе·®дҪңз”ЁдёӢ,еҜҶе°ҒеңҲеңЁе·ҘдҪңж—¶ж„Ҳиҙҙж„Ҳзҙ§,д»ҘиҮӘеҠЁеҠ ејәеҜҶе°Ғж•ҲжһңгҖӮ
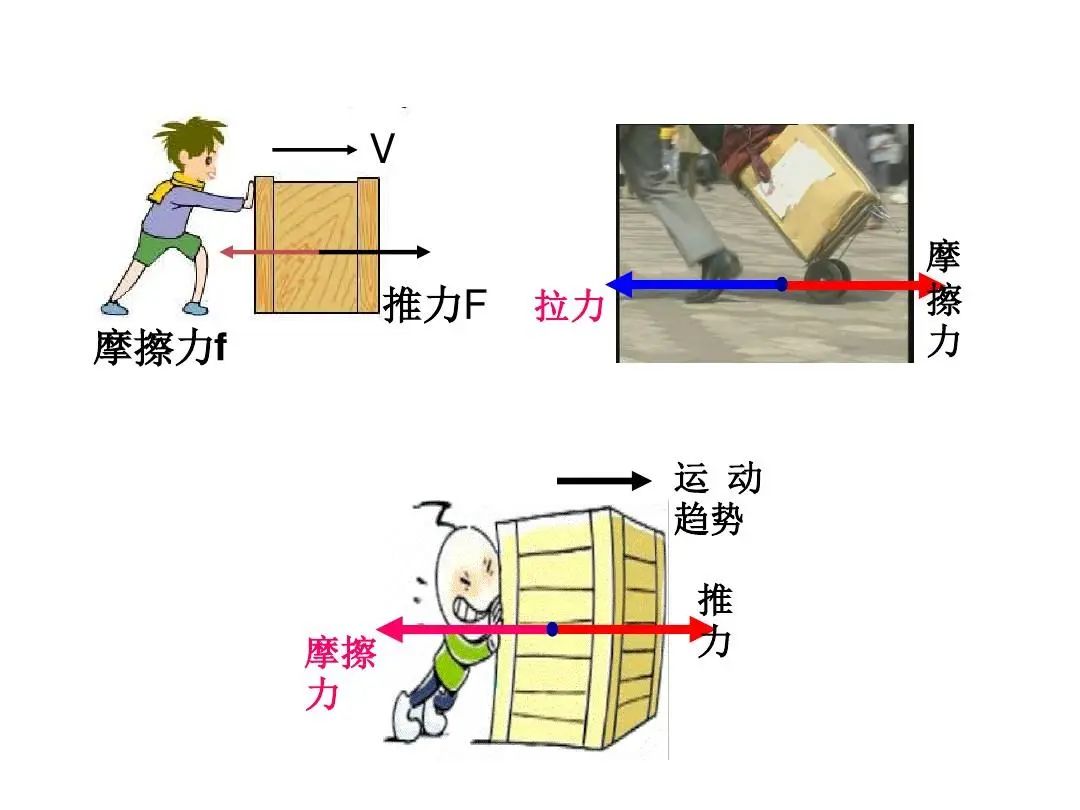
жңәжў°дёӯзҡ„ж‘©ж“Ұ
дёӨдёӘжҺҘи§ҰиЎЁйқўдҪңзӣёеҜ№иҝҗеҠЁжҲ–жңүзӣёеҜ№иҝҗеҠЁи¶ӢеҠҝж—¶,е°Ҷдјҡжңүйҳ»жӯўе…¶дә§з”ҹзӣёеҜ№иҝҗеҠЁзҡ„зҺ°иұЎеҸ‘з”ҹпјҢиҝҷз§ҚзҺ°иұЎз§°дёәж‘©ж“ҰгҖӮж‘©ж“Ұзҡ„еӨ§е°ҸеҸҜйҖҡиҝҮж‘©ж“Ұзі»ж•°жқҘиЎЎйҮҸгҖӮжңәжў°дёӯеёёи§Ғзҡ„ж‘©ж“ҰжңүдёӨеӨ§зұ»:дёҖзұ»жҳҜеҸ‘з”ҹеңЁзү©иҙЁеҶ…йғЁ,йҳ»зўҚеҲҶеӯҗй—ҙзӣёеҜ№иҝҗеҠЁзҡ„еҶ…ж‘©ж“Ұ;еҸҰдёҖзұ»жҳҜеңЁзү©дҪ“жҺҘи§ҰиЎЁйқўдёҠдә§з”ҹзҡ„йҳ»зўҚе…¶зӣёеҜ№иҝҗеҠЁзҡ„еӨ–ж‘©ж“ҰгҖӮеңЁжңәжў°иҝҗеҠЁзі»з»ҹдёӯе…іеҝғзҡ„жҳҜеӨ–ж‘©ж“Ұ,ж №жҚ®ж‘©ж“ҰиҝҗеҠЁеүҜзҡ„иҝҗеҠЁзҠ¶жҖҒпјҢеҸҜеҲҶдёәйқҷж‘©ж“Ұе’ҢеҠЁж‘©ж“ҰгҖӮ
дј еҠЁй“ҫдёӯзҡ„еҠӣзҹ©
дҪңз”ЁеңЁдј еҠЁй“ҫдёӯзҡ„еҠӣзҹ©(иҪҪиҚ·),дёҖиҲ¬жңүйқҷеҠӣзҹ©(йқҷиҪҪиҚ·)гҖҒеҠЁеҠӣзҹ©(еҠЁиҪҪиҚ·)е’Ңж‘©ж“ҰеҠӣзҹ©3з§ҚгҖӮ
йқҷеҠӣзҹ©пјҡжҳҜжҢҮеҠӣзҹ©зҡ„еӨ§е°ҸйҡҸж—¶й—ҙеҸҳеҢ–еҫҲе°ҸжҲ–дёҚеҸҳеҢ–,дј еҠЁеңЁжӯЈеёёзЁіе®ҡиҝҗиҪ¬ж—¶жүҖдј йҖ’зҡ„еҠӣзҹ©.еҚіеұһйқҷеҠӣзҹ©гҖӮ
еҠЁеҠӣзҹ©пјҡжҳҜжҢҮдј еҠЁеңЁеҗҜеҠЁжҲ–еҒңжӯўж—¶,з”ұдәҺйҖҹеәҰеҸҳеҢ–дә§з”ҹеҠ йҖҹеәҰиҖҢеј•иө·зҡ„йҷ„еҠ еҠӣзҹ©гҖӮ
ж‘©ж“ҰеҠӣзҹ©пјҡжҳҜжҢҮеңЁиҪ®йҪҝе•®еҗҲеӨ„е’Ңеҗ„иҪҙжүҝз”ұдәҺж‘©ж“ҰиҖҢеј•иө·зҡ„йҳ»еҠӣзҹ©гҖӮеңЁзЎ®е®ҡй©ұеҠЁз”өжңәеҠҹзҺҮж—¶еҸҜйҮҮз”Ёе№іеқҮж•ҲзҺҮжқҘеӨ„зҗҶ,еңЁз ”з©¶дј еҠЁзҡ„зҒөжҙ»жҖ§,йҳІжӯўдј еҠЁеҮәзҺ°еҚЎж»һзӯүзҺ°иұЎж—¶еә”иҖғиҷ‘зһ¬ж—¶ж•ҲзҺҮгҖӮ
жңәжў°дј еҠЁ
жңәжў°дј еҠЁжҳҜзІҫеҜҶжңәжў°дёӯзҡ„дёҖдёӘжһҒдёәйҮҚиҰҒзҡ„йғЁеҲҶгҖӮдј еҠЁжҳҜжҢҮдј йҖ’иҝҗеҠЁ(еўһйҖҹ﹑еҮҸйҖҹжҲ–ж”№еҸҳиҝҗеҠЁзҡ„еӣһиҪ¬ж–№еҗ‘)е’ҢеҠЁеҠӣ(еҠӣжҲ–еҠӣзҹ©)гҖӮжңәжў°дј еҠЁжҳҜжҢҮйҮҮз”Ёжңәжў°зҡ„ж–№ејҸжқҘе®һзҺ°иҝҗеҠЁе’ҢеҠЁеҠӣзҡ„дј йҖ’гҖӮ
(1)еӣһиҪ¬-еӣһиҪ¬иҝҗеҠЁ:е…¶дёӯжңүдҫқйқ ж‘©ж“ҰеҠӣдј еҠЁзҡ„ж‘©ж“ҰиҪ®дј еҠЁе’Ңзҡ®еёҰдј еҠЁ;жңүдҫқйқ иҪ®йҪҝе•®еҗҲдј еҠЁзҡ„зІҫеҜҶйҪҝиҪ®дј еҠЁе’ҢйҪҝеҪўеёҰдј еҠЁ;жңүеҲ©з”Ёжңәжў°жіўдј еҠЁзҡ„и°җжіўйҪҝиҪ®дј еҠЁзӯүгҖӮ
(2)еҠӣ(еҠҹзҺҮ)дј еҠЁ:дё»иҰҒз”ЁжқҘдј йҖ’еҠЁеҠӣ,ж”№еҸҳеҠӣжҲ–еҠӣзҹ©зҡ„еӨ§е°ҸгҖӮеҜ№е®ғзҡ„иҰҒжұӮдё»иҰҒжҳҜеә”дҝқиҜҒи¶іеӨҹзҡ„ејәеәҰгҖӮ
ж‘©ж“Ұдј еҠЁ
ж‘©ж“ҰиҪ®дј еҠЁжҳҜеҲ©з”Ёдё»еҠЁиҪ®дёҺд»ҺеҠЁиҪ®еңЁзӣҙжҺҘжҺҘи§ҰеӨ„дә§з”ҹзҡ„ж‘©ж“ҰеҠӣжқҘдј йҖ’иҝҗеҠЁе’ҢеҠЁеҠӣзҡ„гҖӮ
йҪҝиҪ®дј еҠЁзҡ„еӨұж•ҲеҪўејҸ
йҪҝиҪ®дј еҠЁзҡ„еӨұж•ҲеҪўејҸдё»иҰҒжҳҜиҪ®йҪҝзҡ„еӨұж•Ҳп№җиҪ®йҪҝеңЁе·ҘдҪңиҝҮзЁӢдёӯеҸҜиғҪдә§з”ҹзҡ„еӨұж•ҲеҪўејҸдё»иҰҒжңүиҪ®йҪҝжҠҳж–ӯе’ҢејҜжӣІеЎ‘жҖ§еҸҳеҪўгҖҒйҪҝйқўзӮ№иҡҖе’ҢзЈЁжҚҹгҖӮ
ејҜжӣІеЎ‘жҖ§еҸҳеҪўпјҡз”ұеЎ‘ж–ҷжҲ–й«ҳеЎ‘жҖ§жқҗж–ҷеҲ¶жҲҗзҡ„йҪҝиҪ®,еҪ“еҸ—еҠӣиҝҮеӨ§ж—¶,иҪ®йҪҝдјҡеҮәзҺ°ејҜжӣІжҖ§еҸҳеҪўгҖӮдёәдәҶйҳІжӯўиҪ®йҪҝз–ІеҠіжҠҳж–ӯ,еә”иҝӣиЎҢйҪҝж №ејҜжӣІз–ІеҠіејәеәҰи®Ўз®—гҖӮдёәдәҶйҳІжӯўејҜжӣІеЎ‘жҖ§еҸҳеҪў,еә”йӘҢз®—зҹӯжңҹиҝҮиҪҪж—¶зҡ„ејҜжӣІйқҷејәеәҰгҖӮйҮҮз”ЁжӯЈеҸҳдҪҚйҪҝиҪ®гҖҒеҠ еӨ§йҪҝж №еңҶи§’еҚҠеҫ„﹑йҷҚдҪҺиЎЁйқўзІ—зіҷеәҰеҖјгҖҒйҮҮз”ЁиЎЁйқўејәеҢ–еӨ„зҗҶ(еҰӮе–·дёёгҖҒзўҫеҺӢ)зӯү,еҸҜжҸҗй«ҳйҪҝиҪ®зҡ„ејҜжӣІејәеәҰгҖӮ
иҪҙжүҝзҡ„зұ»еһӢ
зІҫеҜҶжңәжў°дёӯйҮҮз”Ёзҡ„иҪҙжүҝдё»иҰҒеҲҶдёә3зұ»:
(1пјүж»‘еҠЁ(ж‘©ж“Ұ)иҪҙжүҝгҖӮеңЁиҪҙжүҝдёӯдә§з”ҹзҡ„ж‘©ж“Ұдёәж»‘еҠЁж‘©ж“Ұ;
(2пјүж»ҡеҠЁ(ж‘©ж“Ұ)иҪҙжүҝгҖӮеңЁиҪҙжүҝдёӯдә§з”ҹзҡ„ж‘©ж“Ұдёәж»ҡеҠЁж‘©ж“Ұ;
(3пјүд»ӘиЎЁзү№з§ҚиҪҙжүҝгҖӮйҷӨдёҠиҝ°дёӨзұ»иҪҙжүҝеӨ–,еңЁд»ӘеҷЁд»ӘиЎЁдёӯеә”з”Ёзҡ„з»“жһ„е°әеҜёжҜ”иҫғе°Ҹзҡ„иҪҙжүҝгҖӮ
дёҠиҝ°иҪҙжүҝжҢүе…¶жүҖиғҪжүҝеҸ—иҪҪиҚ·зҡ„ж–№еҗ‘,еҸҲеҸҜеҲҶдёә3зұ»:
(1)еҗ‘еҝғ(еҫ„еҗ‘)иҪҙжүҝгҖӮдё»иҰҒжүҝеҸ—еҫ„еҗ‘иҪҪиҚ·;
(2)жҺЁеҠӣ(жӯўжҺЁ)иҪҙжүҝгҖӮдё»иҰҒжүҝеҸ—иҪҙеҗ‘иҪҪиҚ·;
(3)еҗ‘еҝғжҺЁеҠӣиҪҙжүҝгҖӮеҸҜеҗҢж—¶жүҝеҸ—еҫ„еҗ‘иҪҪиҚ·е’ҢиҪҙеҗ‘иҪҪиҚ·гҖӮ
еҜ№иҪҙжүҝзҡ„иҰҒжұӮ
еңЁзІҫеҜҶжңәжў°дёӯ,еҜ№иҪҙжүҝзҡ„дё»иҰҒиҰҒжұӮжҳҜ:(1)еӣһиҪ¬зІҫеәҰй«ҳ;(2)ж‘©ж“ҰеҠӣзҹ©е°Ҹ;(3)еңЁе·ҘдҪңиҪҪиҚ·дҪңз”ЁдёӢ,жңүи¶іеӨҹзҡ„ејәеәҰ,еҲҡеәҰе’ҢиҖҗзЈЁжҖ§гҖӮ
иҪҙзҡ„зұ»еһӢ
еә”з”ЁеңЁзІҫеҜҶжңәжў°дёӯзҡ„иҪҙ,жҢүз»“жһ„еҸҜеҲҶдёәзӣҙиҪҙ﹑жӣІиҪҙе’ҢжҢ жҖ§жӣІ,е…¶дёӯзӣҙиҪҙеҸҲеҲҶе…үиҪҙгҖҒйҳ¶жўҜиҪҙе’Ңз©әеҝғиҪҙзӯү;жҢүиҪҙжүҖжүҝеҸ—иҪҪиҚ·зҡ„жҖ§иҙЁеҸҜеҲҶдёәеҝғиҪҙ﹑иҪ¬иҪҙе’Ңдј еҠЁиҪҙ,иҝҷдәӣиҪҙжҳҜзІҫеҜҶжңәжў°и®ҫи®ЎдёӯжңҖеёёйҮҮз”Ёзҡ„гҖӮ
В еҝғиҪҙз”ЁжқҘж”ҜжүҝеӣһиҪ¬йӣ¶д»¶,е·ҘдҪңж—¶еҸӘжүҝеҸ—ејҜзҹ©иҖҢдёҚдј йҖ’иҪ¬зҹ©гҖӮе®ғеҸҜд»ҘйҡҸеӣһиҪ¬йӣ¶д»¶дёҖиө·иҪ¬еҠЁ,з§°дёәиҪ¬еҠЁеҝғиҪҙ;д№ҹеҸҜд»ҘдёҚйҡҸеӣһиҪ¬йӣ¶д»¶дёҖиө·иҪ¬еҠЁ,з§°дёәдёҚиҪ¬еҠЁеҝғиҪҙгҖӮиҪ¬еҠЁзҡ„еҝғиҪҙеҸ—еҸҳеә”еҠӣ,дёҚиҪ¬еҠЁзҡ„еҝғиҪҙеҸ—йқҷеә”еҠӣгҖӮиҪ¬иҪҙе·ҘдҪңж—¶ж—ўжүҝеҸ—ејҜзҹ©еҸҲжүҝеҸ—иҪ¬зҹ©гҖӮдј еҠЁиҪҙе·ҘдҪңж—¶еҸӘжүҝеҸ—иҪ¬зҹ©жҲ–дё»иҰҒжүҝеҸ—иҪ¬зҹ©,еҰӮд»ӘеҷЁдёӯзҡ„жҹҗдәӣдёӯй—ҙиҪҙгҖҒдёҮеҗ‘иҒ”иҪҙеҷЁзҡ„дёӯй—ҙиҪҙеҸҠжңәеәҠдёӯзҡ„е…үжқ зӯүгҖӮ
иҪҙзҡ„дҪҝз”ЁиҰҒжұӮ
(1пјүејәеәҰгҖӮжҢҮиҪҙеңЁеӨ–иҪҪиҚ·дҪңз”ЁдёӢдёҚеә”иў«з ҙеқҸгҖӮеҜ№дәҺжүҝиҪҪиҫғеӨ§зҡ„иҪҙйңҖиҝӣиЎҢејәеәҰи®Ўз®—;еҜ№дәҺжүҝиҪҪиҫғе°Ҹзҡ„иҪҙ,йҖҡеёёеҸҜж №жҚ®з»“жһ„иҰҒжұӮиҝӣиЎҢи®ҫи®Ў,йғҪйңҖж»Ўи¶іејәеәҰиҰҒжұӮгҖӮ
(2гҖүеҲҡеәҰгҖӮжҢҮиҪҙеңЁеӨ–иҪҪиҚ·дҪңз”ЁдёӢжүҖдә§з”ҹзҡ„ејҜжӣІе’ҢжүӯиҪ¬еҸҳеҪў,дёҚиғҪи¶…иҝҮе…Ғи®ёеҖј,еҗҰеҲҷе°ҶеҪұе“ҚиҪҙзҡ„еӣһиҪ¬зІҫеәҰе’Ңзј©зҹӯеҜҝе‘ҪгҖӮжүҖд»ҘеҪ“зІҫеәҰиҰҒжұӮиҫғй«ҳж—¶,дҝқиҜҒи¶іеӨҹзҡ„еҲҡеәҰжҳҜеҫҲйҮҚиҰҒзҡ„гҖӮ
иҪҙзҡ„ејәеәҰи®Ўз®—
ж №жҚ®иҪ¬зҹ©TеҲқжӯҘдј°з®—иҪҙзҡ„жңҖе°Ҹзӣҙеҫ„dmin
ж №жҚ®ејҜжүӯеӨҚеҗҲејәеәҰи®Ўз®—иҪҙеҫ„d
1пјүж №жҚ®ејҜжүӯеӨҚеҗҲејәеәҰи®Ўз®—иҪҙеҫ„d
2пјүдҪңеҮәејҜзҹ©еӣҫ
3пјүдҪңеҮәиҪ¬зҹ©еӣҫ
4пјүдҪңеҮәеҪ“йҮҸејҜзҹ©еӣҫ
5пјүж №жҚ®ејҜжүӯеӨҚеҗҲејәеәҰи®Ўз®—иҪҙзҡ„зӣҙеҫ„d
иҪҙзҡ„еҲҡеәҰи®Ўз®—
1.иҪҙзҡ„ејҜжӣІеҲҡеәҰи®Ўз®—
2.иҪҙзҡ„жүӯиҪ¬еҲҡеәҰи®Ўз®—

зәҝжҖ§еҺӢз”өй©ұеҠЁеҷЁPAзі»з»ҹ
еҹәдәҺеҺӢз”өе ҶеҸ зҡ„еҜ№иұЎзҡ„зәҝжҖ§зі»з»ҹгҖӮеҲҶжһҗеҸҜз”ұеҺӢз”өжҖ§зҡ„жң¬иҙЁж–№зЁӢејҖе§ӢпјҢе…¶ж¬ЎжҳҜеҠӣзҡ„дә§з”ҹпјҢ然еҗҺзү©дҪ“зҡ„移еҠЁгҖӮиҖғиҷ‘еҺӢз”өж•Ҳеә”пјҢеҫ—еҲ°жң¬иҙЁж–№зЁӢеҰӮдёӢпјҡ

ејҸдёӯsigmaдёәеә”еҠӣзҹўйҮҸпјӣsдёәеә”еҸҳзҹўйҮҸпјӣVдёәз”өеңәзҹўйҮҸпјӣDдёәз”өеҠЁдҪҚ移зҹўйҮҸпјӣcдёәеј№жҖ§еҲҡеәҰеёёж•°зҹ©йҳөпјӣeдёәдёҖдёӘеҺӢз”өеёёж•°зҹ©йҳөпјҢepsilonдёәд»Ӣз”өеёёж•°зҹ©йҳөпјӣдёҠж ҮEе’ҢSеҲҶеҲ«жҢҮжҒ’е®ҡз”өеңәе’ҢжҒ’е®ҡеә”еҸҳгҖӮ
зәҝжҖ§еҺӢз”өй©ұеҠЁеҷЁзҡ„жҺЁеҠЁеҠӣжҳҜйқ еҺӢз”өеҸ е Ҷзӯ’дә§з”ҹзҡ„пјҢжҜҸеұӮж–ҪеҠ дәҶеҠӣFiгҖӮиҖғиҷ‘еҲ°еҺӢз”өеҸ е Ҷзҡ„дёҚе№іиЎЎпјҢй©ұеҠЁеҠӣеҸҜд»ҘиЎЁзӨәеҰӮдёӢпјҡ
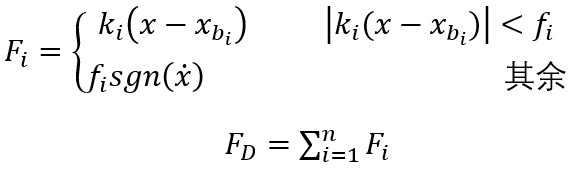
ејҸдёӯпјҢkдёәеҲҡеәҰпјӣxдёәдҪҚзҪ®пјӣxbдёәеқ—дҪҚзҪ®пјӣfдёәеҲҶиЈӮеҠӣгҖӮ
ж‘ҶиҪ¬еҺӢз”өй©ұеҠЁеҷЁзі»з»ҹ
з”ұдәҺеј№з°§еҠӣеҺӢдёӢз”өеҠЁжңәпјҢиҪҙеҗ‘иҙҹиҚ·еҮәзҺ°еңЁзӯ’еҶ…гҖӮз®ҖеҸҜд»Ҙи§Ҷдёәз®ЎгҖӮд»ҘдёӢж–№зЁӢиў«еә”з”Ёпјҡ

ејҸдёӯпјҢFsдёәеј№з°§еҠӣпјӣksеј№з°§еёёж•°пјӣysдёәеј№з°§дҪҚ移гҖӮеҺӢзј©еҠӣеңЁжҺ§еҲ¶д№ӢдёӢпјҢеӣ дёәеј№з°§дҪҚзҪ®sжҳҜеҸҜи°ғиҠӮзҡ„гҖӮеј№з°§еёёж•°еҸ–еҶідәҺеј№з°§зұ»еһӢгҖӮз”ұдәҺиҪҙеҗ‘еҺӢеҠӣпјҢеј№з°§еҠӣеҜјиҮҙзӯ’收缩

ејҸдёӯпјҢsigmaдёәиҪҙеҗ‘еә”еҠӣпјҲз”ұдәҺиҪҙеҗ‘еҠӣзҡ„еә”еҠӣпјүпјӣAaxдёәйқўз§Ҝпјӣd2е’Ңd1еҲҶеҲ«жҳҜзӯ’зҡ„еҶ…гҖҒеӨ–зӣҙеҫ„пјҢ并且еә”еҸҳдёә
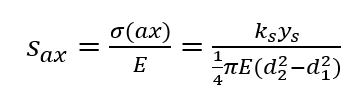
ејҸдёӯпјҢSaxдёәиҪҙеҗ‘еә”еҸҳпјӣEдёәеј№жҖ§жЁЎйҮҸгҖӮ