行业动态 | 基于物理模拟器和世界模型的具身智能学习:深度解析与未来展望(上)
- 2026-07-07 02:13:17
行业动态 | 基于物理模拟器和世界模型的具身智能学习:深度解析与未来展望(上)
1. 引言:什么是世界模型
1.1 研究背景与动机
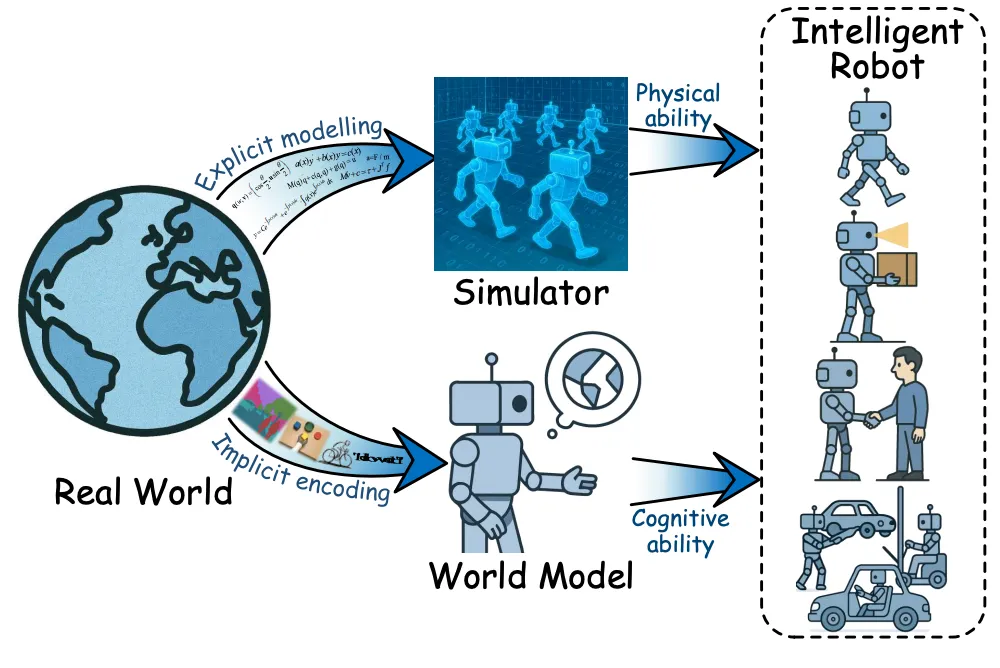
在人工智能的发展历程中,一个核心问题始终困扰着研究者:如何让机器像人类一样理解和预测这个复杂多变的世界?世界模型(World Models)作为解决这一问题的关键技术,正在成为实现通用人工智能(AGI)的重要基石。
随着深度学习的快速发展,我们见证了AI在感知和决策方面的巨大进步。然而,现有的大多数AI系统仍然是反应式的——它们只能对当前输入做出响应,缺乏对未来的预测能力。这种局限性在复杂动态环境中尤为明显,比如自动驾驶、机器人操作等具身智能任务。
具身智能(Embodied Intelligence)的核心挑战在于智能体需要在物理世界中与环境进行实时交互。这要求系统不仅要理解当前状态,还要能够预测行动的后果,并在不确定性下做出最优决策。传统的端到端学习方法虽然在某些任务上表现出色,但往往缺乏对环境动态的深层理解,难以泛化到新的情况。
1.2 世界模型的核心概念
世界模型可以理解为智能体内部携带的环境表示,就像一个"计算雪球",包含了对外部世界动态、物理规律和因果关系的深层理解。与传统的反应式AI系统不同,拥有世界模型的智能体能够在执行动作之前,在内部"想象"和评估可能的结果,从而做出更加明智的决策。
从认知科学的角度来看,世界模型体现了人类思维的核心特征:
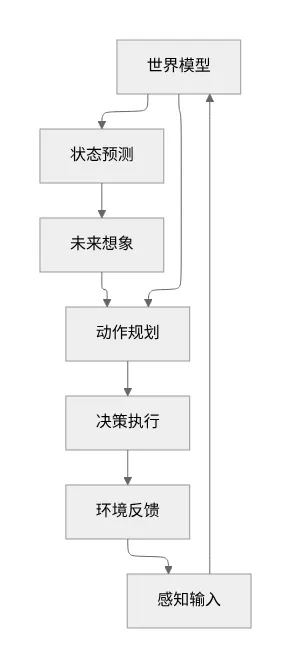
• 内部模拟:在执行动作前进行心理预演 • 因果推理:理解行动与结果之间的因果关系 • 预测能力:基于当前状态预测未来可能的状态 • 规划能力:通过模拟不同行动序列来制定计划
1.3 历史发展轨迹
世界模型的发展可以追溯到人工智能的早期研究。让我们回顾这一技术的重要里程碑:
早期探索阶段(1950s-1990s)
• 1950s:冯·诺依曼提出自复制自动机概念,首次讨论机器的内部世界模型 • 1980s:认知科学家开始研究人类的心理模型(Mental Models) • 1990s:早期的基于模型的强化学习方法开始出现
理论奠基阶段(2000s-2010s)
• 2007:Sutton和Barto在《强化学习:导论》中系统阐述了基于模型的学习 • 2012:深度学习革命开始,为世界模型提供了强大的表示学习能力 • 2015:Watter等人提出了基于变分自编码器的世界模型
现代突破阶段(2018-至今)
• 2018:Ha和Schmidhuber发表经典论文《World Models》,正式提出现代世界模型概念 • 2019-2021:Dreamer系列模型的发布,展示了世界模型在强化学习中的强大能力 • 2022-2024:大规模视频生成模型(如Sora)的出现,为世界模型带来了新的突破 • 2024-至今:多模态世界模型和统一架构成为研究热点
2018年,Ha和Schmidhuber首次系统性地提出了世界模型的概念,他们展示了如何通过学习环境的压缩生成模型来模拟体验,使智能体能够在没有直接与现实世界交互的情况下进行强化学习。这一突破性工作为后续的研究奠定了坚实基础。
随着视频生成模型的快速发展,特别是2024年以来Sora、Kling等模型的出现,世界模型的能力得到了显著提升。这些模型在高保真度视频合成和物理世界建模方面表现出色,证明了世界模型作为"物理世界引擎"的巨大潜力。正如OpenAI在Sora的技术报告中所强调的,视频生成模型有望成为理解和模拟物理世界的强大工具。
1.4 当前研究趋势
当前世界模型的研究呈现出以下几个重要趋势:
多模态融合现代世界模型不再局限于单一模态,而是整合视觉、语言、听觉等多种感知输入,构建更加全面的环境理解。
大规模预训练借鉴大语言模型的成功经验,研究者开始探索在大规模数据上预训练通用世界模型,然后针对特定任务进行微调。
物理约束建模显式地将物理定律和约束嵌入到模型中,提高预测的物理合理性和泛化能力。
实时部署优化为了在实际应用中部署,研究者致力于提高模型的计算效率和实时性能。
2. 智能机器人等级分类体系
2.1 分级标准概述
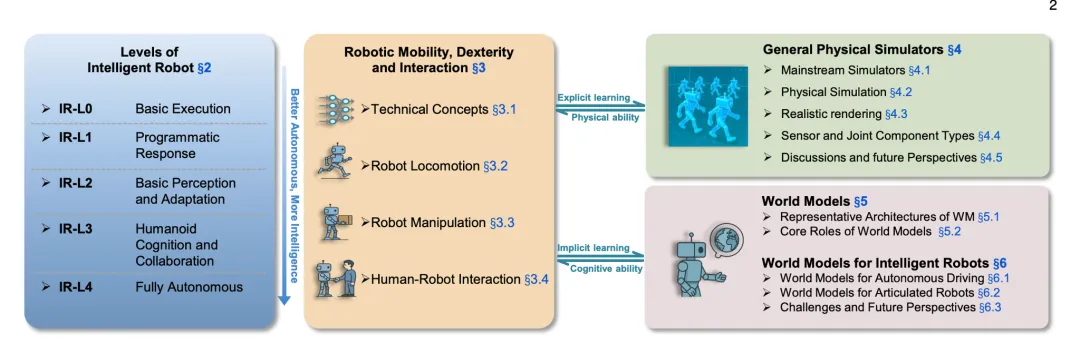
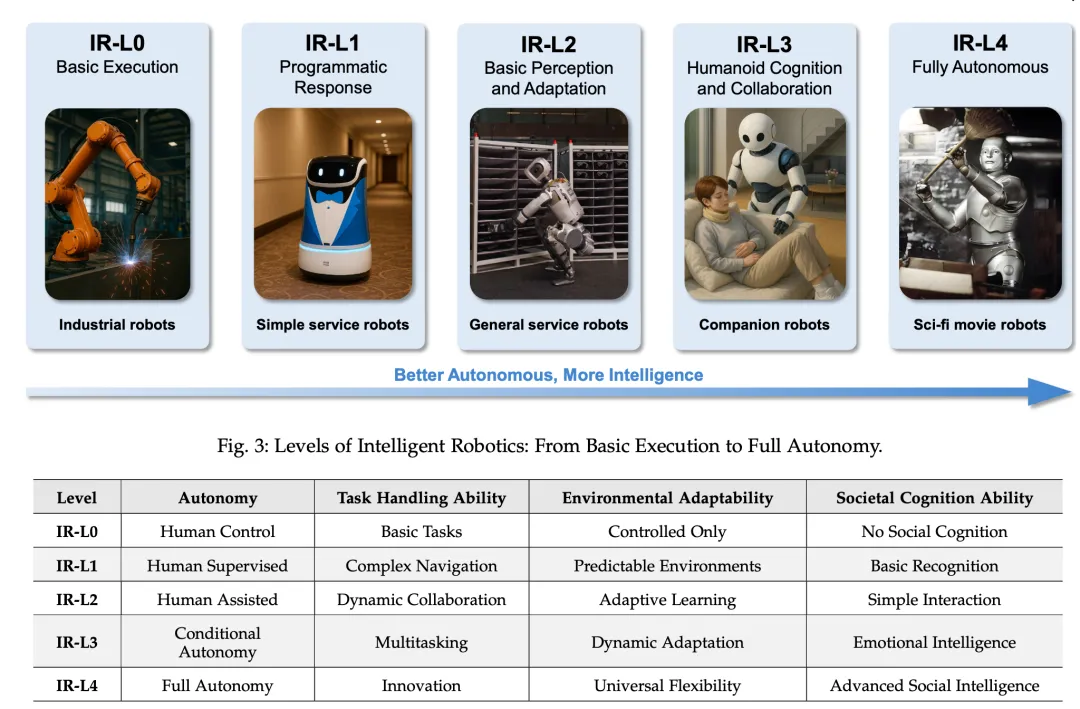
随着具身智能技术的不断发展,建立一个统一的智能机器人分级标准变得至关重要。本研究提出了一个从IR-L0到IR-L4的五级分级标准,用于评估机器人的自主性、任务处理能力、环境适应性和社会认知能力。
2.2 详细分级介绍
2.2.1 IR-L0:基础执行级别(Foundation Execution Level)
核心特征:
• 完全非智能、程序驱动的属性 • 专注于执行高度重复、机械化、确定性的任务 • 完全依赖预定义的程序指令或实时遥操作 • 缺乏环境感知、状态反馈或自主决策能力
技术要求:
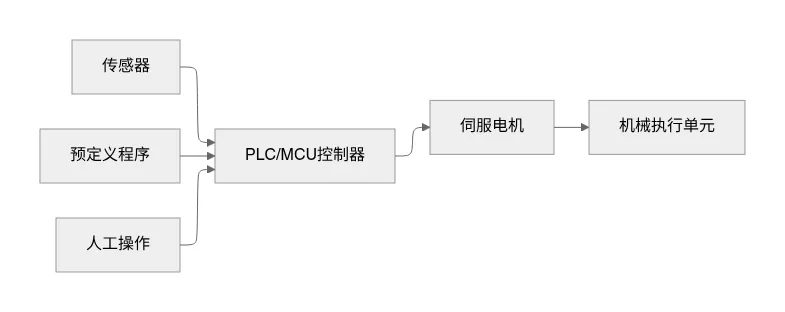
• 硬件:高精度伺服电机和刚性机械结构 • 控制系统:基于PLC或MCU的运动控制器 • 感知能力:极其有限,通常涉及限位开关、编码器等 • 控制算法:主要基于预定义脚本、动作序列或遥操作 • 人机交互:非常有限,或者仅限于简单的按钮/遥操作
典型应用:
• 工业焊接机器人 • 固定路径的物料搬运 • 简单的装配线作业
技术局限性:
• 无法处理环境变化 • 缺乏学习能力 • 需要精确的环境设置
2.2.2 IR-L1:程序化响应级别(Programmed Response Level)
核心特征:
• 具有有限的基于规则的反应能力 • 能够执行预定义的任务序列 • 利用基本传感器触发特定的行为模式 • 只能在规则明确的封闭任务环境中表现出操作稳定性
技术要求:
• 传感器:集成基本传感器(红外、超声波、压力) • 处理能力:适度增强的处理器能力 • 感知能力:能够检测障碍物、边界和简单的人类运动 • 控制算法:基于规则引擎和有限状态机(FSM),辅以基本的SLAM或随机游走算法
典型应用:
• 扫地机器人(如Roomba) • 简单的接待机器人 • 基础的安保巡逻机器人
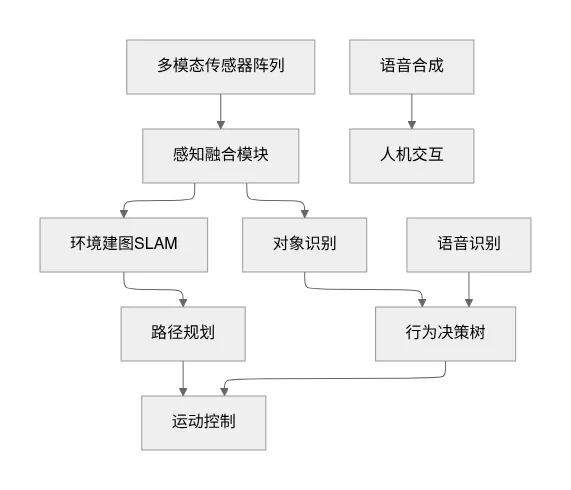
2.2.3 IR-L2:基础感知与适应性级别(Basic Perception and Adaptation Level)
核心特征:
• 引入了初步的环境意识和自主能力 • 能够在动态环境中执行任务 • 支持语音命令执行和路径规划 • 具备基本的对象识别能力
技术架构:
关键技术突破:
• 多模态感知:整合摄像头、激光雷达、麦克风阵列 • 环境理解:基本的对象识别和环境建图能力 • 自然交互:语音识别和合成,能够理解和执行基本命令 • 适应性行为:基于环境变化调整行为策略
典型应用场景:
• 服务机器人(送餐、导航引导) • 智能家居助手 • 教育机器人
2.2.4 IR-L3:人形认知与协作级别(Humanoid Cognition and Collaboration Level)
核心特征:
• 在复杂动态环境中表现出自主决策能力 • 支持复杂的多模态人机交互 • 能够推断用户意图并相应地调整行为 • 在既定的伦理约束内运行
技术要求:
• 高性能计算:GPU加速的深度学习推理 • 多模态传感器:深度摄像头、肌电图传感器、力感测阵列 • AI架构:基于深度学习的感知和语言理解(CNN、Transformer) • 学习能力:强化学习用于适应性策略优化 • 伦理系统:嵌入伦理治理系统,防止不安全或不符合规定的行为
典型应用:
• 老年护理机器人 • 医疗辅助机器人 • 高级家庭服务机器人
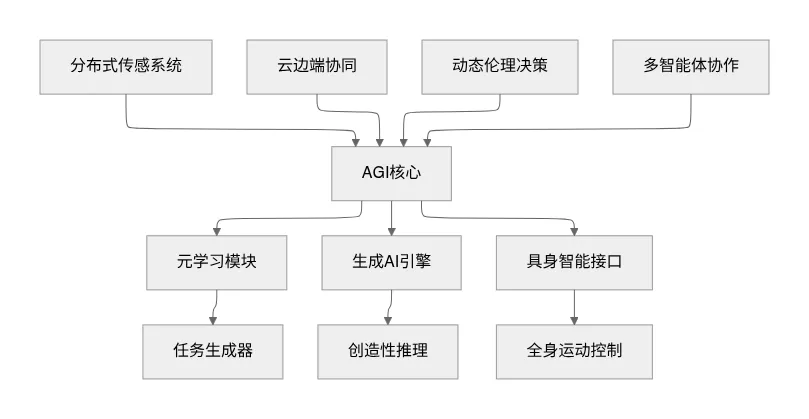
2.2.5 IR-L4:完全自主级别(Full Autonomy Level)
核心特征:
• 完全的自主性,能够在任何环境中独立运行 • 具备自我进化的伦理推理能力 • 高级认知能力、移情能力和长期适应性学习能力 • 支持复杂的社交互动和多智能体协作
技术架构愿景:
技术要求(未来愿景):
• 仿生结构:高度仿生结构,具有全身多自由度关节 • 计算平台:分布式高性能计算平台 • 感知系统:全方位、多尺度、多模态传感系统 • AI架构:集成通用人工智能(AGI)框架 • 学习能力:元学习、生成人工智能和具身智能 • 伦理系统:动态伦理决策系统,能够在伦理困境中做出道德选择
预期应用:
• 通用家庭伙伴机器人 • 复杂工业协作机器人 • 科研助手机器人 • 社会服务机器人
2.3 分级标准的应用价值
这个分级标准不仅为技术发展提供了清晰的路线图,还为以下方面提供了指导:
监管和安全评估
• 为不同级别的机器人制定相应的安全标准 • 建立分级认证体系 • 指导责任分配和法律框架
产业发展规划
• 帮助企业明确技术发展目标 • 指导投资决策和资源配置 • 促进产业链协同发展
伦理部署指导
• 为不同级别机器人的伦理使用提供框架 • 指导人机交互设计 • 促进社会接受度
3. 物理模拟器:虚拟世界的基石
3.1 物理模拟器概述
物理模拟器是机器人研究和开发的基础工具,它们提供了高保真的虚拟环境,使研究人员能够在安全、高效的条件下训练和验证机器人行为。随着具身智能技术的发展,物理模拟器的重要性日益凸显。
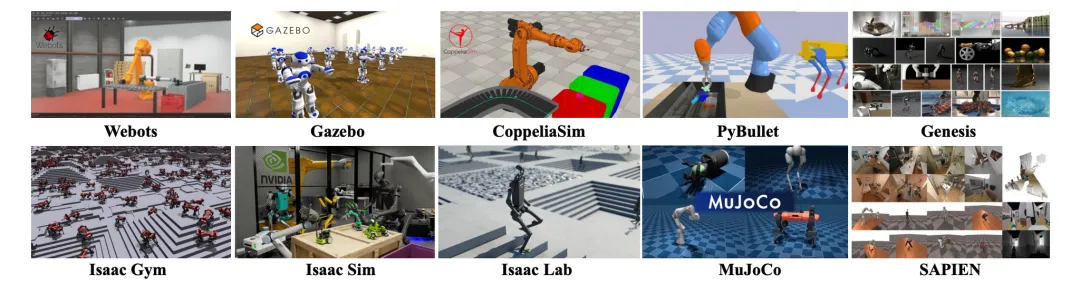
3.2 主流物理模拟器详细分析
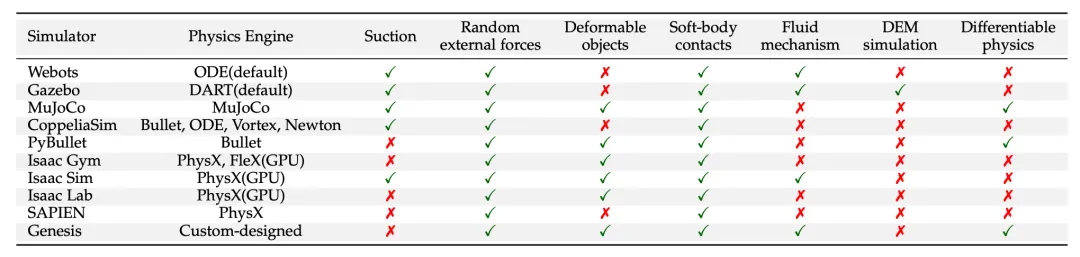
3.2.1 传统通用模拟器
Webots:教育与工业的桥梁
Webots由Cyberbotics Ltd.于1998年推出,经过多年发展,已成为机器人教育和研究的重要平台。
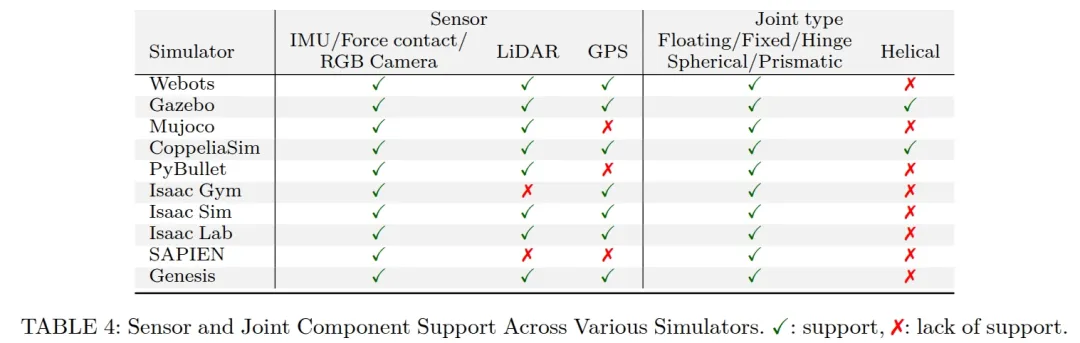
技术特点:
• 渲染引擎:基于OpenGL的WREN引擎,支持PBR • 物理引擎:内置ODE物理引擎 • 编程接口:支持Python、C++、Java、MATLAB • 机器人模型:丰富的预建机器人库 • 传感器支持:完整的传感器仿真
应用优势:
• 易于学习和使用 • 强大的可视化界面 • 完善的文档和教程 • 活跃的社区支持
局限性:
• 不支持可变形体 • 缺乏流体动力学 • 并行计算能力有限
Gazebo:ROS生态的核心
Gazebo是开源机器人仿真平台,与ROS深度集成,是机器人研究的重要工具。
技术特点:
• 模块化设计:插件架构,高度可扩展 • 物理引擎:支持ODE、Bullet、DART等多种引擎 • 传感器模拟:完整的传感器生态系统 • 分布式仿真:支持多机分布式计算
应用优势:
• 与ROS无缝集成 • 强大的插件系统 • 丰富的传感器模型 • 支持多机器人仿真
挑战与限制:
• 学习曲线较陡 • 性能优化复杂 • 大规模仿真限制
3.2.2 高性能专业模拟器
MuJoCo:精准物理建模的典范
MuJoCo专注于多关节系统的接触丰富动力学建模,是强化学习研究的首选平台。
技术优势:
• 高精度物理:基于广义坐标的优化算法 • 接触建模:精确的接触和摩擦模拟 • 计算效率:高度优化的求解器 • 生物力学:支持腱驱动和肌肉模型
应用领域:
• 强化学习研究 • 人形机器人控制 • 生物力学分析 • 运动控制算法开发
3.2.3 GPU加速新一代模拟器
Isaac Gym:并行仿真的革命
NVIDIA Isaac Gym开创了GPU大规模并行物理仿真的新时代。
技术突破:
• 大规模并行:单GPU上数千个环境同时仿真 • GPU加速:完全在GPU上运行的物理引擎 • 强化学习优化:专为RL训练优化的接口 • 高吞吐量:百万级样本/秒的训练速度
4. 总结
今天我们分析了模拟器在具身智能发展中的应用过程,下一篇内容我们将详细分析世界模型的基础理论和架构,带各位继续深入了解这个行业方向,敬请期待。
更多ROS、具身智能相关内容,请关注古月居
👉 关注我们,发现更多有深度的自动驾驶/具身智能/GitHub 内容!
🚀 往期内容回顾 👀
🔥 行业杂谈 | ROS2 Bag 数据导出的终极方案:ros2_unbag 深度解析🔥 十分钟读论文 | 薛定谔导航器:让机器人学会“想象“未来的零样本目标导航框架🔥 十分钟读论文 | LightVLA详解——通过可微分Token剪枝实现高效视觉-语言-动作模型
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 黄金上演“过山车”行情!1月30日单日暴跌超8%,背后原因全解析
- 不出彩,就出局!2026年人力资源行业生存指南
- 黄金价格崩了,资源股行情终结?
- 稀土永磁与有色金属:十五家年报预增的行业闪耀之星
- 日经225指数行情 + 日经225ETF基金跟踪(01.31 )
- 标普500指数行情+ 场内、场外ETF基金跟踪 (01月31日)
- 2026饮品行业趋势深度解析:4.5万亿市场重构,这5大风口决定未来格局
- 2026,A股大行情的黄金爆发点:三重逻辑定乾坤,财富重构正当时
- AI重塑医疗健康行业系列文章之二:AI 让生命科学进入“可计算时代”
- 市场分析:黄金白银暴跌,贵金属行情结束了么?
